


 Melbourne BG SCS Train Timetable
Melbourne BG SCS Train Timetable 



Multiplexing ‘Photodetectors’ to detect train occupancy.
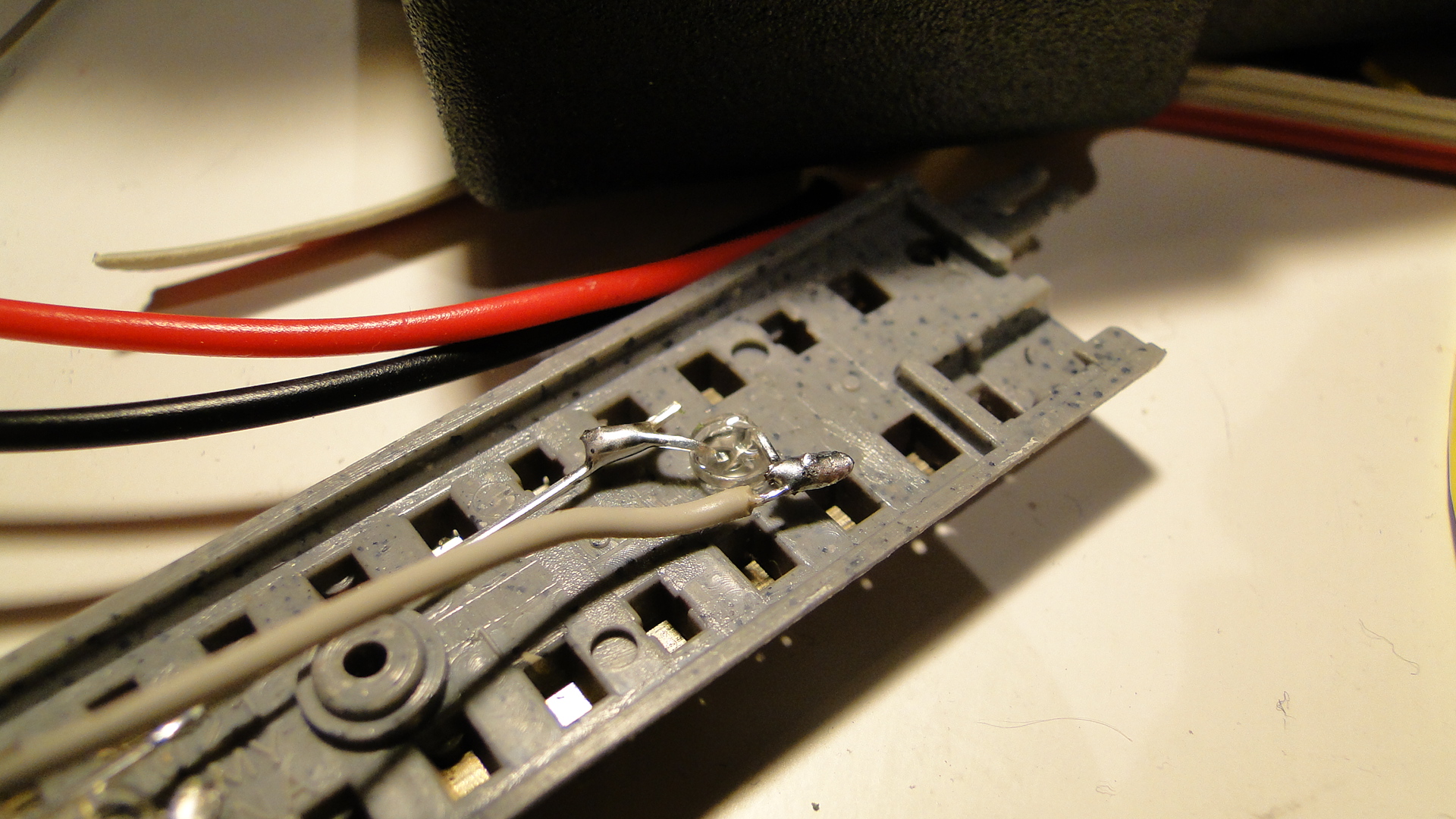
Right, I wasn't impressed whilst using the Sharp distance detectors and so went back to the age-old method of light-detection between the sleepers. As this is N Scale, I didn't want the standard, large and bulky Light Dependent Resistors and went for these smaller 'Photodetectors' found on eBay from a Taiwanese reseller.
These were chosen based on the fact that they have a flat lens/front and are clear. They fit nicely between sleepers of Tomix FineTrack and, since I'd already laid and ballasted my main loop, could be retrofitted by drilling up and through the base.
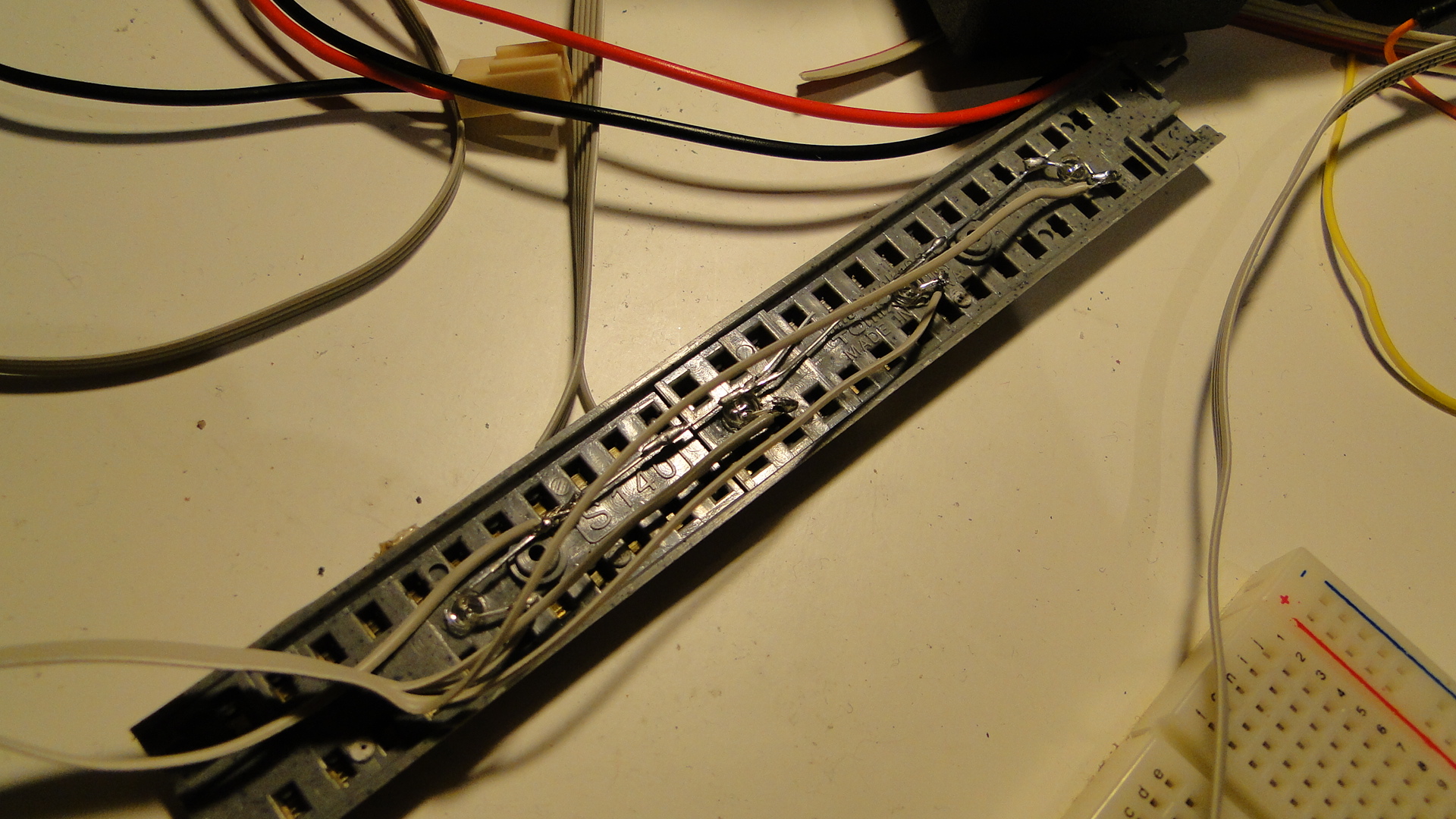
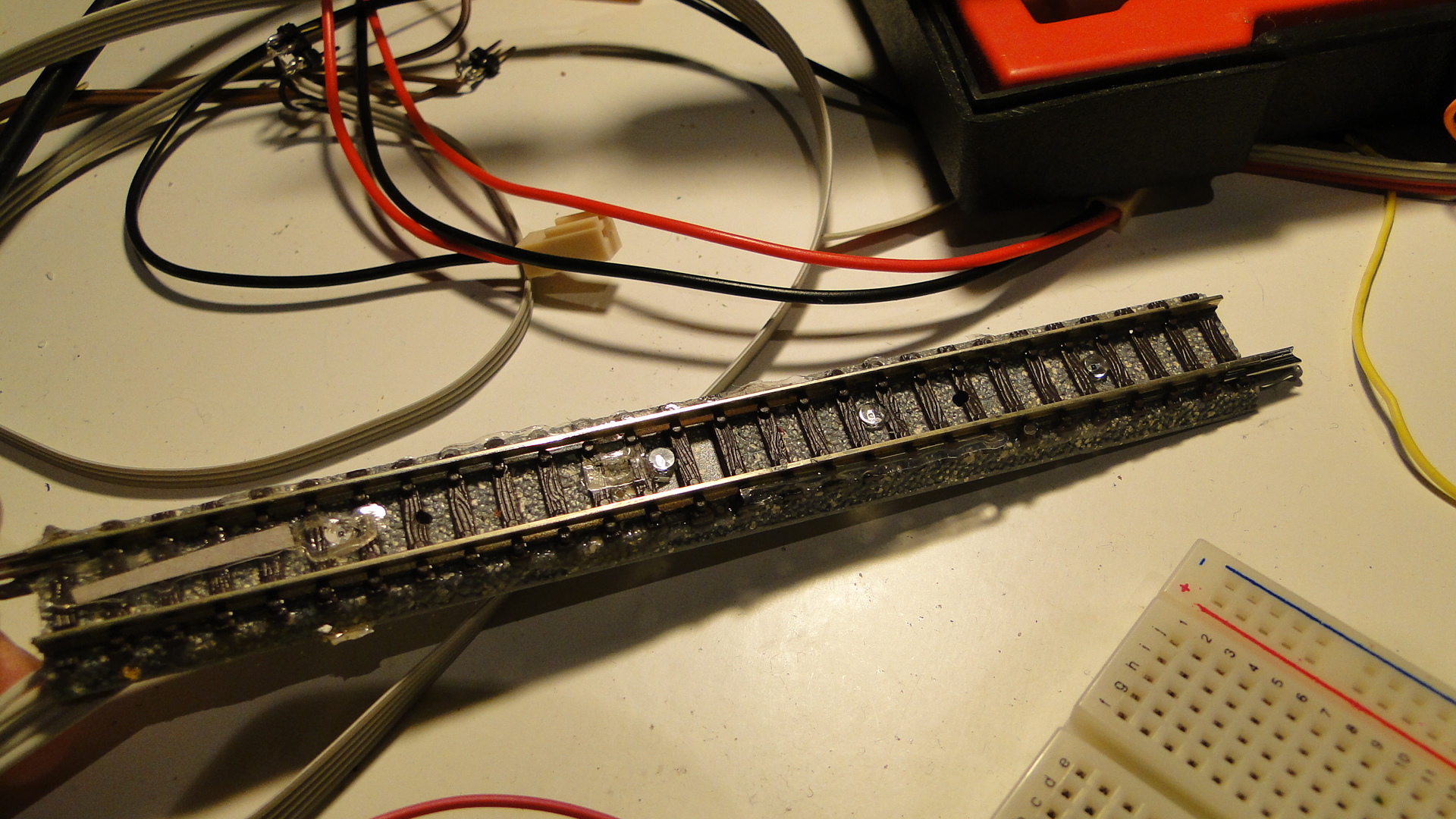
Now, since I bought these in bulk, I started going crazy and sticking them everywhere I could. The goal was to put one everywhere that would become a good trigger-point for automation. I started with all of my stabling areas and put one at the start, middle and end of the sidings. I would use the 'trigger' from these to know when to slow to an engine to 50% throttle, 25% throttle and then stop. I then also put some in the tunnel entrances, station/platforms and also where signals should probably be (around points.)
It started dawning on me that I would require one analog input pin on my Arduino per photodetector. This would've gotten very expensive very quickly, but then I remembered that there was a simple tutorial on multiplexing analog inputs on the Arduino Playground (based on the 4051 IC). This IC would save me a lot of time and resources: with a little more wiring it could potentially give me 64 analog inputs for a total of 6 digital pins and one analog.
Here's the basic idea of wiring up a single 4051.
Here's how you can use multiple 4051s and reduce pin consumption:
Notes on the options in the above image:
- Option 1: Take the wires in the first rectangle and wire them to one analog pin and three digital. This will give you a total of 8 detector inputs.
- Option 2: Take the 8 analog wires and put them into analog input pins. You then also need to connect up the 3 digital pins. For all inputs you'll only ever need 3 digital pins. But for the analog pins you'll need 1 pin for each 8 inputs. (i.e. 8:1, 16:2, 24:3, 32:4, etc... there is no upper limit, as long as you have the analog inputs.)
- Option 3: Take the single analog pin and then the 6 digital pins. This will give you a total of 64 inputs and will use more digital than analog pins.
As you can see, you can interface with a lot of analog detectors, based on what pins you have available. As you may be aware, analog inputs are more 'expensive' on the Arduino than digital outputs as there are less available.
The process to control the above circuit is to set the digital pins to the desired address and then read the analog pin(s). You then need to set the next address and read the same pin (depending on your setup.) As changing through a lot of inputs and reading can take time, you need to be careful how many detectors you end up implementing. I have no exact numbers; but reading 64 inputs can easily be done in under a second. The goal is to make sure that a train does not pass a detector before it has been read!
So we have our detectors installed and circuitry built; we could now write software to manage it all. The basic idea was to read the value, adjust the min/max of that single detector and then check if it exceeded a threshold. Since these detectors required light to function, they would be effected by the amount of ambient light in the room and therefore the code would need to be smart enough to work out what was 'covered' (i.e. vehicle blocking light) and what was 'open'.
This code was also noted in my previous post where I used the Sharp detectors. These detectors produced a lot of noise and had to be filtered so that my code wouldn't simply trigger when a high/low value broke a threshold.
Here is the basic idea for reading one detector:
read value of detector if (detector value is greater than recorded maximum) then record new maximum value if (detector value is lower than recorded minimum) then record new minimum value if (either min or max has changed) then update range of this detector [max - min] adjust threshold [max - (range*0.25)] end if if (detector value is greater than threshold) then report that this detector is 'active' else report that this detector is 'inactive' end if
Right, so the above concept uses a 25% threshold below the maximum-read-value to see if the value read from the detector is 'active'. It is also constantly updating it's valid reading range so that it can adapt to the environmental changes. The main issue with this concept is that if the environment drastically changes (lights are turned on/off, curtains opened/closed, etc...) then this code would not adapt, as it never has a chance to 'retract' the limits. Therefore the following adjustment needs to be made:
store the last 32 values of detector in circular array read value of detector and push last into array, popping off the first value find the lowest value in the array and store as the minimum extremity find the highest value in the array and store as the maximum extremity if (either min or max has changed) then update range of this detector [max - min] calculate the average from the last 32 read values adjust threshold [average + (max-min*0.10)] end if if (detector value is greater than this threshold) then report that this detector is 'active' else report that this detector is 'inactive' end if
Here you can now see that we only care about the last 32 read values (instead of the max and min since the code was running.) We are also using a new threshold calculation: 10% above the average of the last 32 values. This therefore means that we will receive an active notification if the value increases 10% above the 'stable' value of which we have been observing.
Of course, we are always able to introduce new issues; the above code, if run at processor-speed will read 32 values in under a second and, dependent on environment changes, may well not be able to cope. We therefore need to only test the detector at a specific interval (your mileage (kilometre'age) may vary!) of say, 100ms. This then means that the 32 values are taken over the course of 3.2 seconds. If this doesn't suit, then you can also increase the buffer size or decrease the polling delay.
But I bet you haven't seen the main issue? If a vehicle is stationary on the detector for too long then the range will/should drop to zero and therefore the detector will always be 'active'.
Wait, that would be correct? Wouldn't it?
It would, but it would also then report active for a certain time span until the range had expanded again once the vehicle had moved on. Note this can also be simulated by a long train traversing the detector and blocking the light (even with intermittent gaps of light) for a long period of time.
To prevent this? Adjust the polling delay and the buffer size...
Another good trick for limiting environmental effects is to add lights/LEDs to your layout around the detectors to ensure they always have a good source of UV. That way, when those curtains close, the ranges of your detectors wont drop too low.
What's next... well, what do you want to do with all this new information? You need to read it, pass it to the methods we've described above to filter the data and then act on it. Since we're multiplexing, we need to first tell our 4051 IC(s) which input we want to read and then read it. The following classes operate the multiplexers and detectors:
class DetectorCollection {
private:
struct Detector {
int dValues[32];
int dMax;
int dMin;
int dRange;
int dAverageValue;
int dCurrentValue;
int dThreshold;
int dCurrentIndex;
bool dFullArray;
int dAnalogPin;
int dBitIndex;
bool dIsActive;
} detectors[32];
int numDetectors;
int digPins[3];
public:
DetectorCollection(int _digPin1, int _digPin2, int _digPin3);
bool AddDetector(int _aPin, int _bit);
void UpdateDetector(int detector);
void UpdateAllDetectors();
bool IsActive(int detector);
void DebugInformation(int detector);
int GetCurrentValue(int detector);
};
DetectorCollection::DetectorCollection(int _digPin1, int _digPin2, int _digPin3) {
numDetectors = 0;
digPins[0] = _digPin1;
digPins[1] = _digPin2;
digPins[2] = _digPin3;
}
bool DetectorCollection::AddDetector(int _aPin, int _bit) {
//initialise a detector. the array contains "zero'd" detectors
//by default
if (numDetectors < 32) {
detectors[numDetectors].dAnalogPin = _aPin;
detectors[numDetectors].dBitIndex = _bit;
for (int idx = 0; idx < 32; idx++)
detectors[numDetectors].dValues[idx] = 0;
detectors[numDetectors].dMax = 0;
detectors[numDetectors].dMin = 999;
detectors[numDetectors].dRange = 0;
detectors[numDetectors].dAverageValue = 0;
detectors[numDetectors].dThreshold = 0;
detectors[numDetectors].dCurrentIndex = 0;
detectors[numDetectors].dFullArray = false;
detectors[numDetectors].dIsActive = false;
numDetectors++;
return true;
} else return false;
}
void DetectorCollection::UpdateDetector(int detector) {
//set digital pins
for (int pin = 0; pin < 3; pin++)
digitalWrite(digPins[pin],
((detectors[detector].dBitIndex >> abs(pin-2)) & 0x01) == true ? HIGH : LOW);
//read analog pin.
detectors[detector].dCurrentValue =
analogRead(detectors[detector].dAnalogPin);
detectors[detector].dValues[detectors[detector].dCurrentIndex] =
detectors[detector].dCurrentValue;
//find the lowest and highest values in the array and store as
//the minimum and maximum extremities.
int tempVal, newValue = 0;
bool extremitiesChanged = false;
for (int idx = 0; idx < 32; idx++) {
tempVal = detectors[detector].dValues[idx];
if (tempVal < detectors[detector].dMin || detectors[detector].dMin == 0) {
detectors[detector].dMin = tempVal;
extremitiesChanged = true;
}
if (tempVal > detectors[detector].dMax) {
detectors[detector].dMax = tempVal;
extremitiesChanged = true;
}
//used for average calculated below.
newValue += tempVal;
}
//update range of this detector [max - min]
detectors[detector].dRange =
detectors[detector].dMax - detectors[detector].dMin;
if (newValue > 0) {
if (detectors[detector].dFullArray)
detectors[detector].dAverageValue = newValue / 32;
else detectors[detector].dAverageValue =
newValue / (detectors[detector].dCurrentIndex + 1);
//adjust threshold [average + (max-min*0.10)]
detectors[detector].dThreshold =
detectors[detector].dAverageValue +
(detectors[detector].dRange * 0.35);
//adjust active flag:
detectors[detector].dIsActive =
(detectors[detector].dCurrentValue >
detectors[detector].dThreshold);
}
//finally update the next location to store the next incoming value...
//we're using a circular buffer, so just point to the start of the
//array instead of shifting everything along.
detectors[detector].dCurrentIndex++;
if (detectors[detector].dCurrentIndex >= 32) {
detectors[detector].dCurrentIndex = 0;
//for calculating the average, we need to know once
//we have a full buffer. Once it's full we will always
//have a full set of NUM_READINGS values, otherwise
//we only have as many as dCurrentIndex
detectors[detector].dFullArray = true;
}
}
void DetectorCollection::UpdateAllDetectors() {
for (int d = 0; d < numDetectors; d++) UpdateDetector(d);
}
bool DetectorCollection::IsActive(int detector) {
return detectors[detector].dIsActive;
}
int DetectorCollection::GetCurrentValue(int detector) {
return detectors[detector].dCurrentValue;
}
void DetectorCollection::DebugInformation(int detector) {
Serial.print("Detector: ");
Serial.print(detector);
Serial.print(", APin: ");
Serial.print(detectors[detector].dAnalogPin);
Serial.print(", DBit: ");
Serial.print(detectors[detector].dBitIndex);
Serial.print(", Min: ");
Serial.print(detectors[detector].dMin);
Serial.print(", Max: ");
Serial.print(detectors[detector].dMax);
Serial.print(", Range: ");
Serial.print(detectors[detector].dRange);
Serial.print(", Threshold: ");
Serial.print(detectors[detector].dThreshold);
Serial.print(", Average: ");
Serial.print(detectors[detector].dAverageValue);
Serial.print(", Current: ");
Serial.print(detectors[detector].dCurrentValue);
Serial.print(", FullArray: ");
Serial.print(detectors[detector].dFullArray);
Serial.print(", CurrentIndex: ");
Serial.println(detectors[detector].dCurrentIndex);
/*for (int idx = 0; idx < 32; idx++) {
Serial.print("|");
if (idx == detectors[detector].dCurrentIndex) Serial.print("*");
Serial.print(detectors[detector].dValues[idx]);
}
Serial.println("|");*/
}
And now, use it in your main program. Note I've created custom characters for the Arduino Liquid Crystal library via this website.
#define multiplexerPinBitA 40
#define multiplexerPinBitB 41
#define multiplexerPinBitC 42
#define pwmPin 2
#define dirPin1 3
#define dirPin2 4
#define lcdRSPin 30
#define lcdENPin 31
#define lcdD4Pin 32
#define lcdD5Pin 33
#define lcdD6Pin 34
#define lcdD7Pin 35
#include <LiquidCrystal.h>
LiquidCrystal lcd(lcdRSPin, lcdENPin, lcdD4Pin, lcdD5Pin, lcdD6Pin, lcdD7Pin);
//cool hack! create characters for the LiquidCrystal Library!
//see here: http://icontexto.com/charactercreator/
byte trainCharFrontOn[8] =
{B11111,B10001,B10001,B11111,B10101,B11111,B01010,B11111};
byte emptyChar[8] =
{B00000,B00000,B00000,B00000,B00000,B00000,B11111,B10101};
DetectorCollection dCol = DetectorCollection(multiplexerPinBitA,
multiplexerPinBitB, multiplexerPinBitC);
void setup() {
Serial.begin(9600);
pinMode(multiplexerPinBitA, OUTPUT);
pinMode(multiplexerPinBitB, OUTPUT);
pinMode(multiplexerPinBitC, OUTPUT);
for (int d = 0; d < 24; d++) {
//analogpin is 0, 1, 2 [so DIV 8].
//(where 0 is detectors 1-8, 1 is 9-16 and 2 is 17-24)
//bit is the 0-7 on that analog pin [so MOD 8].
dCol.AddDetector(d/8, d%8);
}
//start a train: direction
digitalWrite(dirPin2, HIGH);
digitalWrite(dirPin1, LOW);
//speed (out of 255 [where ~50 is stopped])
analogWrite(pwmPin, 85);
lcd.createChar(0, emptyChar);
lcd.createChar(1, trainCharFrontOn);
lcd.begin(16, 2);
}
void loop() {
//output to the LCD (16x2) the status of all the detectors:
lcd.clear();
lcd.setCursor(0, 0); //top left
for (int d = 0; d < 16; d++) {
dCol.UpdateDetector(d);
lcd.write(dCol.IsActive(d) ? 1 : 0);
}
lcd.setCursor(8, 0);
for (int d = 16; d < 25; d++) {
dCol.UpdateDetector(d);
lcd.write(dCol.IsActive(d) ? 1 : 0);
}
//we still have 8 characters to draw other stuff... no idea what yet though.
delay(333);
}
And then the detectors in action. Note it was at night time and I'm surprised the result was this good!
Random Photos
Search
Tags
Ads
Links - Click for details
- Abandoned Rails (Japan)
- AIRLINE (Shinkansen Photography)
- Akihabara Station
- annexpressのブログ
- Australian Model Railway Magazine
- DCC普及協会ホームページ (Japanese DCC)
- Dead Section (Japanese Track Diagrams)
- Delicious Things (Japanese N Scale DCC)
- Densha Wotorou
- Digital Direct for Windows (DCC Server)
- Don's Dream World – AMAZING N Scale Japanese Layout
- Hatena::Diary
- Japanese N-Scale Modeling Forum
- JR Chiisai
- Kaz-T's blog レインボーライン (Rainbow Line)
- LED Resitance Calculator
- Masioka
- Poppondetta Blog
- RailFan Magazine, Japan
- Railmind
- Railway Travelers' Room
- Serenity Valley
- Shashinka Ichiban
- Shuzuku
- Sumida Crossing
- The next station is…
- Tomix N Gauge Track and Japanese N Gauge Trains
- TT Forums (Transport Tycoon Deluxe)
- 名鉄尾西線の貨物列車 (Nagoya: Meitetsu Freight)
- 日本型Nゲージ DCC改造例のご紹介 (Okiraku DCC)
- 泰 茅 轍 道 (Taichi Railway)
- 箱庭登山鉄道製作記 (Hakone-Tozan Layout Blog)
Archive
- July 2025
- June 2025
- February 2025
- January 2025
- November 2024
- September 2024
- August 2024
- July 2024
- June 2024
- May 2024
- April 2024
- March 2024
- February 2024
- December 2023
- October 2023
- September 2023
- August 2023
- July 2023
- June 2023
- May 2023
- April 2023
- March 2023
- December 2022
- November 2022
- October 2022
- April 2022
- March 2022
- February 2022
- January 2022
- December 2021
- November 2021
- September 2021
- August 2021
- July 2021
- May 2021
- March 2021
- February 2021
- January 2021
- October 2020
- September 2020
- August 2020
- July 2020
- June 2020
- May 2020
- April 2020
- March 2020
- January 2020
- December 2019
- November 2019
- October 2019
- September 2019
- August 2019
- July 2019
- June 2019
- April 2019
- March 2019
- February 2019
- January 2019
- December 2018
- November 2018
- October 2018
- September 2018
- August 2018
- July 2018
- June 2018
- May 2018
- April 2018
- March 2018
- January 2018
- December 2017
- November 2017
- October 2017
- September 2017
- August 2017
- July 2017
- June 2017
- May 2017
- March 2017
- February 2017
- January 2017
- December 2016
- November 2016
- October 2016
- September 2016
- August 2016
- July 2016
- June 2016
- May 2016
- February 2016
- November 2015
- October 2015
- September 2015
- August 2015
- July 2015
- June 2015
- May 2015
- April 2015
- March 2015
- February 2015
- January 2015
- December 2014
- November 2014
- August 2014
- July 2014
- May 2014
- April 2014
- March 2014
- December 2013
- November 2013
- October 2013
- June 2013
- August 2012
- April 2012
- March 2012
- February 2012
- November 2011
- October 2011
- September 2011
- July 2011
- June 2011
- May 2011
- April 2011
- March 2011
- February 2011
- January 2011
- December 2010
- November 2010
- October 2010
- September 2010
- August 2010
- June 2010
- May 2010
- April 2010
- March 2010
- February 2010
- January 2010
- December 2009
- November 2009
- October 2009
- August 2009
- January 2009
- December 2008
- November 2008
- October 2008
- September 2008
- July 2008
April 9th, 2012 - 13:34
Hi good stuff, have you thought about doing speed control of the trains , i have an old ardunio that I used to use for photography, but i can’t programme :-(
Barry
April 9th, 2012 - 15:20
If you just want to use the Arduino as a throttle then look here:
http://modelrail.otenko.com/arduino/controlling-your-trains-with-an-arduino
April 30th, 2013 - 21:37
The photodetectors that you used, could you detail what type and the circuitry design, it is fascinating
What you have done here. Cheers.
November 25th, 2014 - 06:25
Still cant find photodetectors oike ehat you got.
Do you remember who you bought them off?
Cheers Steve
November 25th, 2014 - 08:31
Howdy,
The seller has long since disappeared from eBay. I wouldn’t know where to find these flat ones anymore… your best bet would be to file down other IR sensors.
Steven.