


 Melbourne BG SCS Train Timetable
Melbourne BG SCS Train Timetable 



An attempt to simulate Acceleration and Braking
In my previous post, I'd managed to get my Densha-De-Go Dreamcast controller hooked up to my Arduino Mega. Now although this now meant that I had a great way to control my model railroad, it also meant I had to work out how to code a throttle and a brake lever.
The rules
After a few hours of plotting, I had decided on the following system. It involves a 6-position throttle and an 11-position brake. Each 'position' is to have a 'max speed' and 'speed adjust' associated with it.
Notes
- It is to be assumed that if the brake is on, the throttle is automatically disabled
- MAX is 255 on the PWM Throttle (or max voltage from supply)
- At Throttle 0, the train is neither powering nor braking; we will simply slowly decrement the speed
- There is no feedback to know how fast the train is currently travelling
- There are multiple emergency brake points on the throttle, but we don't care about them.
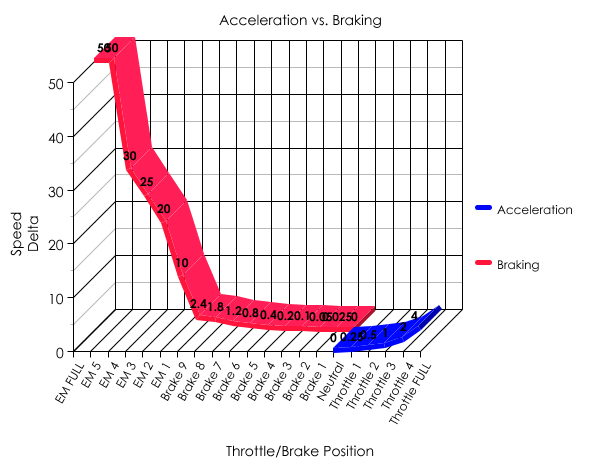
The next table shows my acceleration and braking deltas. This will be a simple addition and subtraction on the current speed.
| Lever position | Max Speed | Speed Adjustment |
|---|---|---|
| Emergency Full | Instant Stop | |
| Emergency 5 | -50 | |
| Emergency 4 | -30 | |
| Emergency 3 | -25 | |
| Emergency 2 | -20 | |
| Emergency 1 | -10 | |
| Brake 9 | -2.4 | |
| Brake 8 | -1.8 | |
| Brake 7 | -1.2 | |
| Brake 6 | -0.8 | |
| Brake 5 | -0.4 | |
| Brake 4 | -0.2 | |
| Brake 3 | -0.1 | |
| Brake 2 | -0.05 | |
| Brake 1 | -0.025 | |
| Throttle 0 | 0 | 0.00 |
| Throttle 1 | 55 | +0.25 |
| Throttle 2 | 75 | +0.5 |
| Throttle 3 | 90 | +1 |
| Throttle 4 | 100 | +1.75 |
| Throttle 5 | 120 | +2.5 |
And now a better way to represent it.
The code
The table above translates to code quite easily... the goal is to have the lever position values coded into an array and then just select the correct entry. Once determined, the main code loop can then determine how to adjust the current voltage output to the rails.
const int throttle_positions = 21;
const int throttle_absolute_maximum_speed = 255;
const int throttle_minimum_speed = 20;
int current_throttle_position = -1; // 0 is EM FULL. Lever must be moved to EM FULL to begin.
float current_speed = 0;
float target_speed = 0;
int throttle_max_speed[throttle_positions] = {
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0, //brake positions and Throttle 0
0, 55, 75, 90, 100, 120
};
float throttle_delta[throttle_positions] = {
0.025, 0.05, 0.1, 0.2, 0.4, 0.8, 1.2, 1.8, 2.4, 10, 20, 25, 30, 50, 9999, //brake
0.00 /*coast*/, 0.25, 0.5, 1, 1.75, 2.5
};
We then need to determine the current throttle position. We will make it that, at the start of code execution, the train should not move until the throttle has been reset to EM Full and the throttle at '0'.
#define BRAKE_MASK 0xf0
#define BRAKE_SHIFT 4
#define ACCEL_MASK 0x07
void read_throttle_position() {
int accel = packet.data[6] & ACCEL_MASK;
int brake = (int)((packet.data[7] & BRAKE_MASK) >> BRAKE_SHIFT);
if (current_throttle_position == -1) {
//check that we have EM FULL and Neutral
if (brake == 15 && accel == 1) {
//set the initial '0' (EM FULL) position.
current_throttle_position = 0;
lcd.clear();
}
} else {
if (brake != 1) { //1 == "BRAKE 1", if it's higher, we're braking.
if (brake > 0) current_throttle_position = brake;
} else { //BRAKE == 1 and then we check the throttle
//we're accelerating.
if ((accel + 15) < 22) current_throttle_position = accel + 15;
}
}
}
And now the main game loop needs to determine the current lever locations and then choose the appropriate action:
void update_speed() {
digitalWrite(13, LOW);
//make sure we are allowed to go.
if (current_throttle_position >= 0) {
if (current_speed > throttle_max_speed[current_throttle_position - 1]) {
current_speed -= throttle_delta[current_throttle_position - 1];
//braking... don't go negative.
if (current_speed < throttle_minimum_speed)
current_speed = 0;
} else if (current_speed < throttle_max_speed[current_throttle_position - 1]) {
//accelerating, so start from minimum speed.
if (current_speed < throttle_minimum_speed)
current_speed = throttle_minimum_speed;
current_speed += throttle_delta[current_throttle_position - 1];
//don't go faster than current throttle max setting.
if (current_speed > throttle_max_speed[current_throttle_position - 1])
current_speed = throttle_max_speed[current_throttle_position - 1];
}
//set light if we have met max speed for throttle.
if (current_speed == throttle_max_speed[current_throttle_position - 1])
digitalWrite(13, HIGH);
//output speed to railway.
analogWrite(7, current_speed);
} else {
//flash the LED to alert user to reset controls.
delay(200); //delay a little to flash the LED
digitalWrite(13, HIGH);
delay(200);
}
}
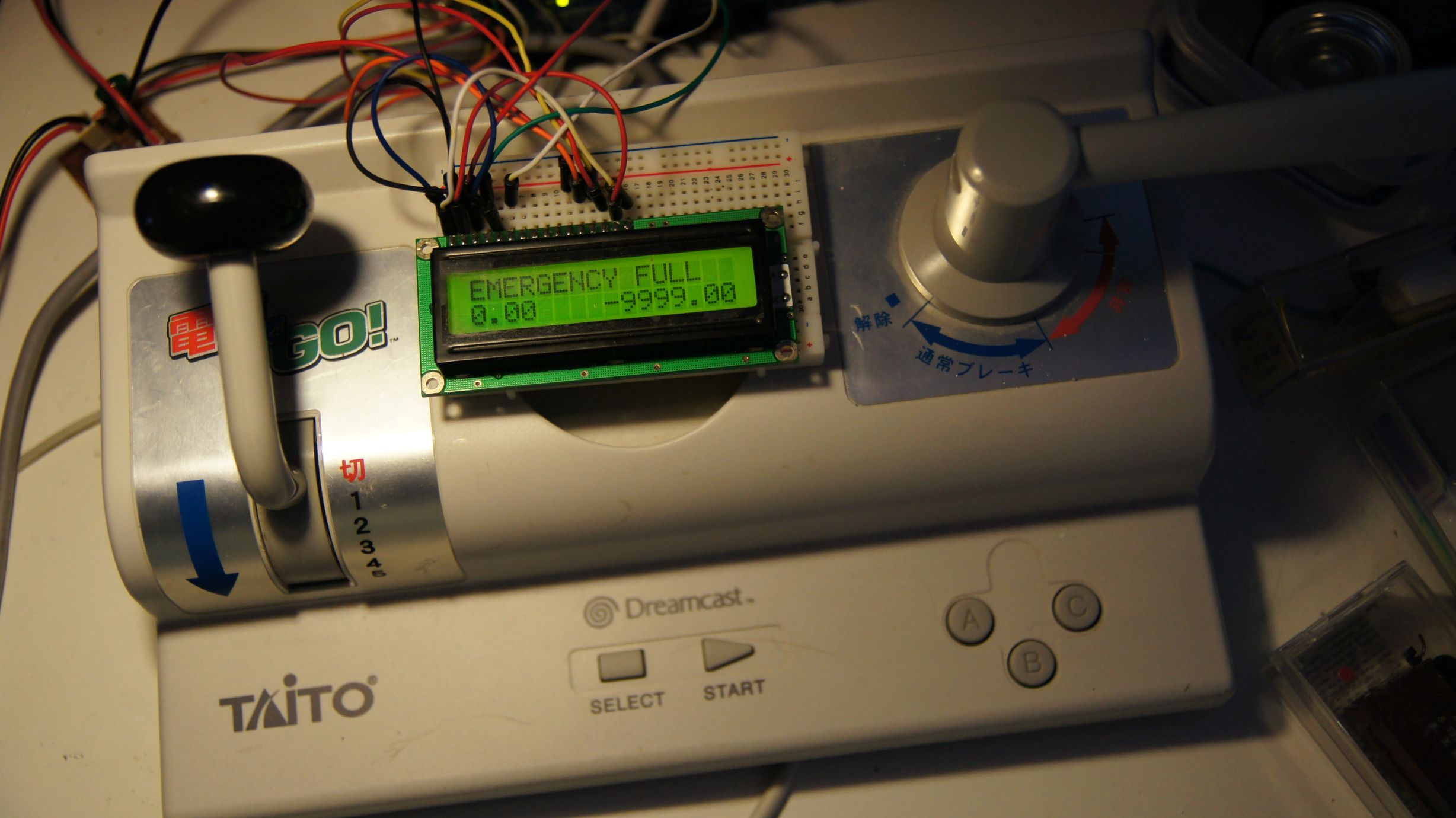
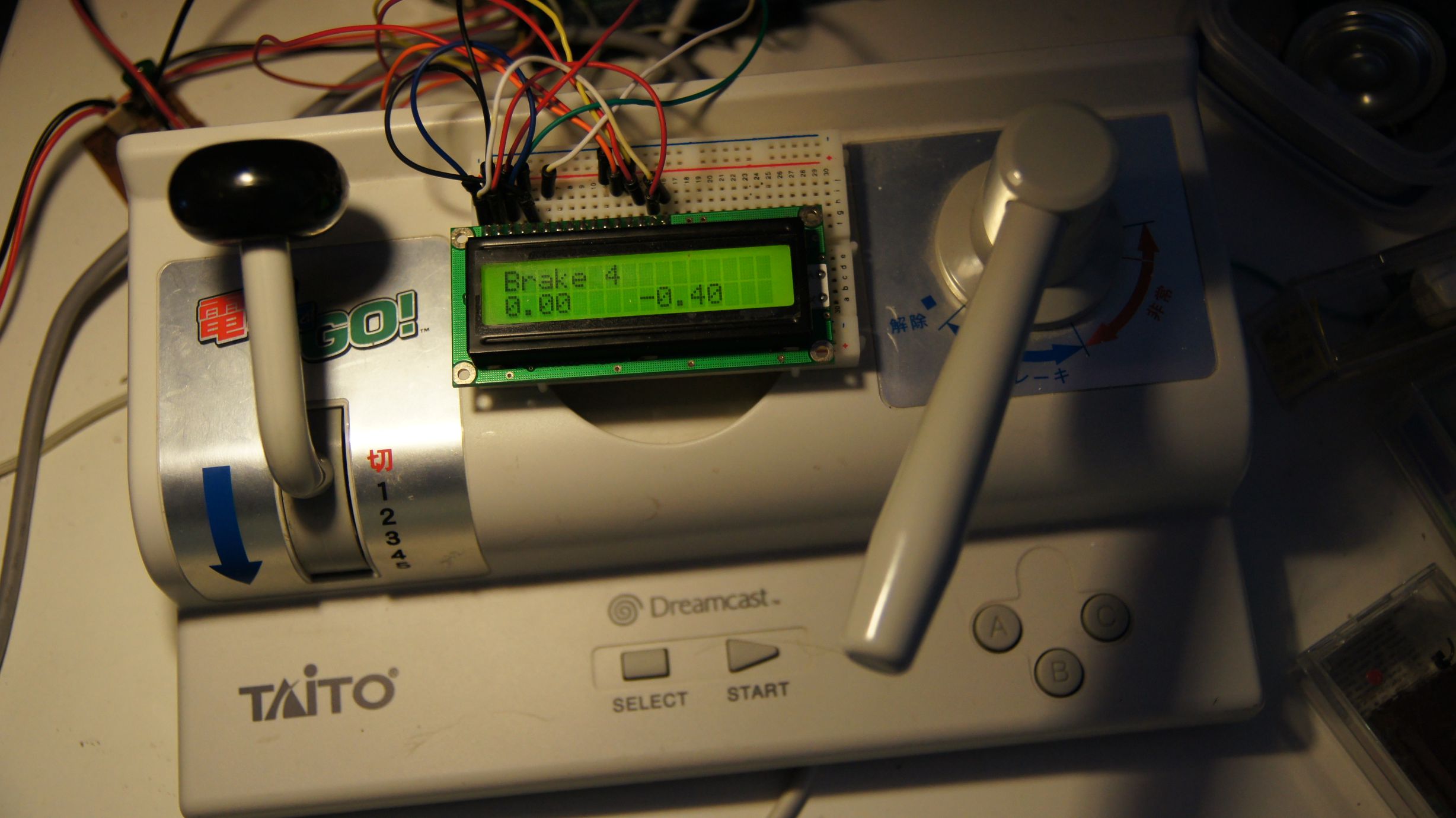
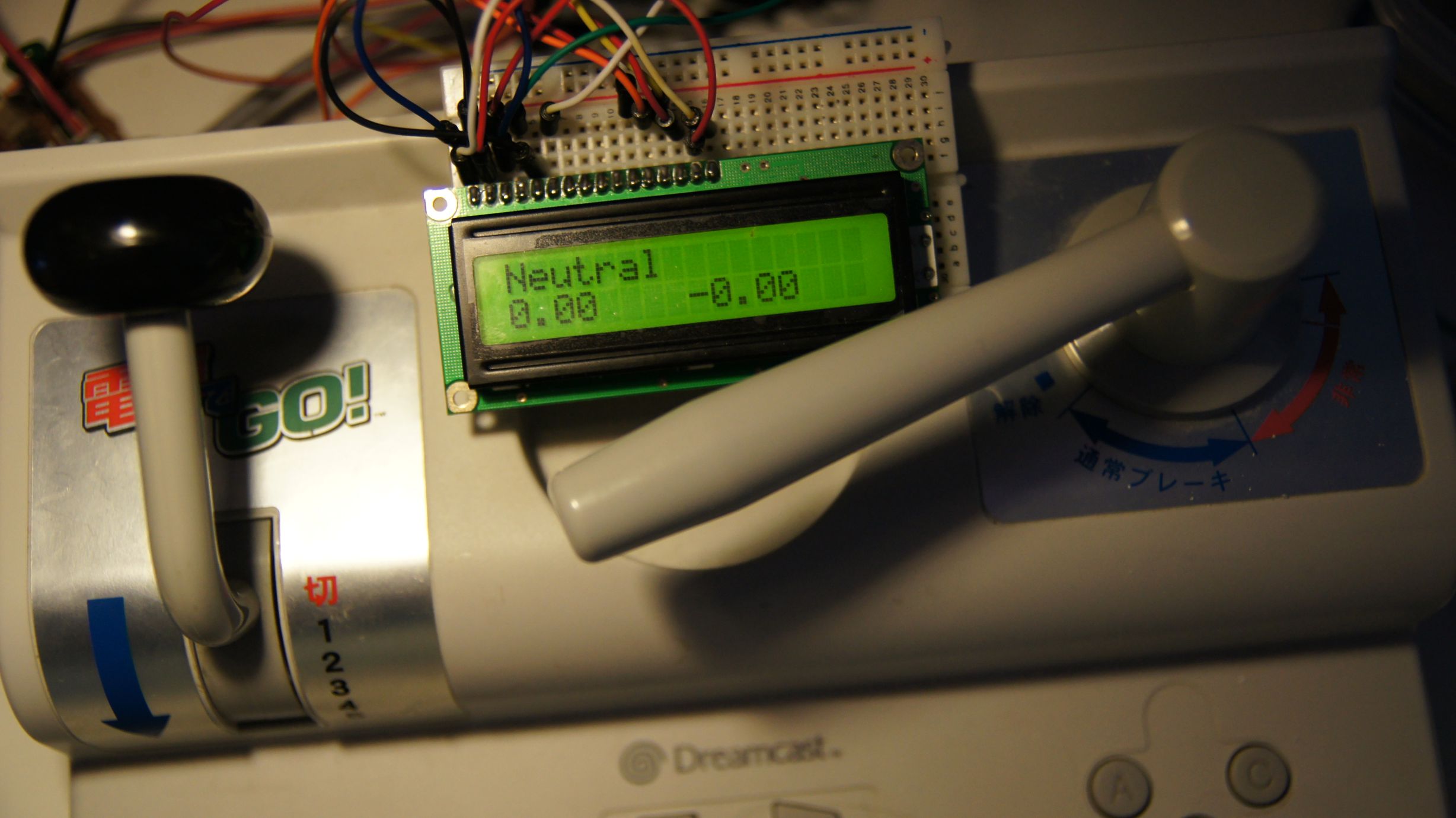
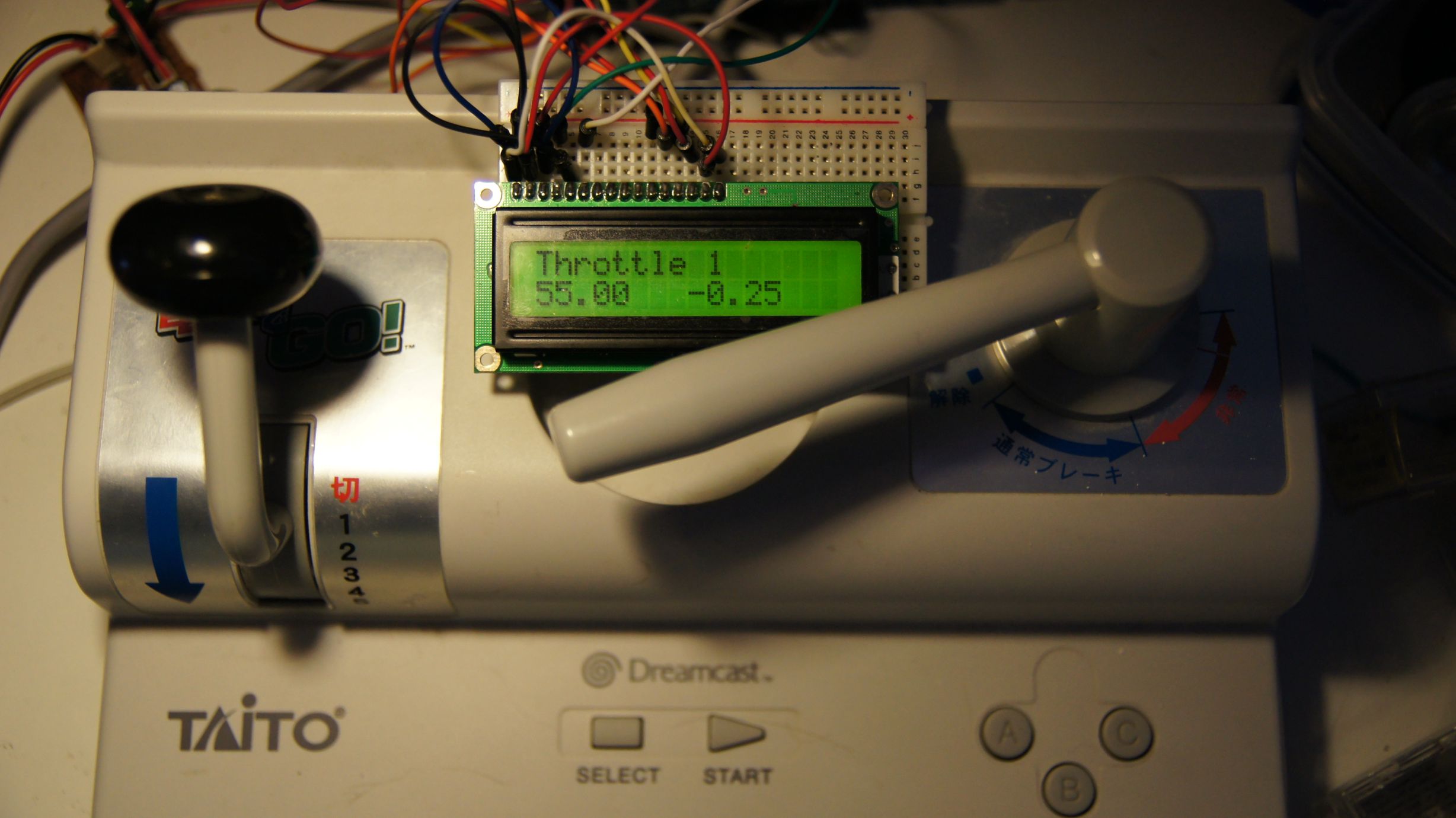
There's also some code in the main loop to update the 16x2 LCD I've hooked up. Since we need to reset the controller when we start, it'll tell you to do so and afterwards will tell you the current throttle/brake position, current speed and speed delta.
 Download the source code here.
Download the source code here.Note that this does not include the full arduino-maple code. Download that here. You will also need the LiquidCrystal library from the Arduino site.
Action shots
Shown is the controller in certain positions. Note that the 'Throttle' positions may show a negative speed delta; this just means that they are no longer accelerating.

Random Photos
Search
Tags
Links - Click for details
- Abandoned Rails (Japan)
- AIRLINE (Shinkansen Photography)
- Akihabara Station
- annexpressのブログ
- Australian Model Railway Magazine
- DCC普及協会ホームページ (Japanese DCC)
- Dead Section (Japanese Track Diagrams)
- Delicious Things (Japanese N Scale DCC)
- Densha Wotorou
- Digital Direct for Windows (DCC Server)
- Don's Dream World – AMAZING N Scale Japanese Layout
- Hatena::Diary
- Japanese N-Scale Modeling Forum
- JR Chiisai
- Kaz-T's blog レインボーライン (Rainbow Line)
- LED Resitance Calculator
- Masioka
- Poppondetta Blog
- RailFan Magazine, Japan
- Railmind
- Railway Travelers' Room
- Serenity Valley
- Shashinka Ichiban
- Shuzuku
- Sumida Crossing
- The next station is…
- Tomix N Gauge Track and Japanese N Gauge Trains
- TT Forums (Transport Tycoon Deluxe)
- 名鉄尾西線の貨物列車 (Nagoya: Meitetsu Freight)
- 日本型Nゲージ DCC改造例のご紹介 (Okiraku DCC)
- 泰 茅 轍 道 (Taichi Railway)
- 箱庭登山鉄道製作記 (Hakone-Tozan Layout Blog)
Archive
- July 2026
- May 2026
- April 2026
- March 2026
- February 2026
- January 2026
- November 2025
- October 2025
- September 2025
- August 2025
- July 2025
- June 2025
- February 2025
- January 2025
- November 2024
- September 2024
- August 2024
- July 2024
- June 2024
- May 2024
- April 2024
- March 2024
- February 2024
- December 2023
- October 2023
- September 2023
- August 2023
- July 2023
- June 2023
- May 2023
- April 2023
- March 2023
- December 2022
- November 2022
- October 2022
- April 2022
- March 2022
- February 2022
- January 2022
- December 2021
- November 2021
- September 2021
- August 2021
- July 2021
- May 2021
- March 2021
- February 2021
- January 2021
- October 2020
- September 2020
- August 2020
- July 2020
- June 2020
- May 2020
- April 2020
- March 2020
- January 2020
- December 2019
- November 2019
- October 2019
- September 2019
- August 2019
- July 2019
- June 2019
- April 2019
- March 2019
- February 2019
- January 2019
- December 2018
- November 2018
- October 2018
- September 2018
- August 2018
- July 2018
- June 2018
- May 2018
- April 2018
- March 2018
- January 2018
- December 2017
- November 2017
- October 2017
- September 2017
- August 2017
- July 2017
- June 2017
- May 2017
- March 2017
- February 2017
- January 2017
- December 2016
- November 2016
- October 2016
- September 2016
- August 2016
- July 2016
- June 2016
- May 2016
- February 2016
- November 2015
- October 2015
- September 2015
- August 2015
- July 2015
- June 2015
- May 2015
- April 2015
- March 2015
- February 2015
- January 2015
- December 2014
- November 2014
- August 2014
- July 2014
- May 2014
- April 2014
- March 2014
- December 2013
- November 2013
- October 2013
- June 2013
- August 2012
- April 2012
- March 2012
- February 2012
- November 2011
- October 2011
- September 2011
- July 2011
- June 2011
- May 2011
- April 2011
- March 2011
- February 2011
- January 2011
- December 2010
- November 2010
- October 2010
- September 2010
- August 2010
- June 2010
- May 2010
- April 2010
- March 2010
- February 2010
- January 2010
- December 2009
- November 2009
- October 2009
- August 2009
- January 2009
- December 2008
- November 2008
- October 2008
- September 2008
- July 2008