


 Melbourne BG SCS Train Timetable
Melbourne BG SCS Train Timetable 



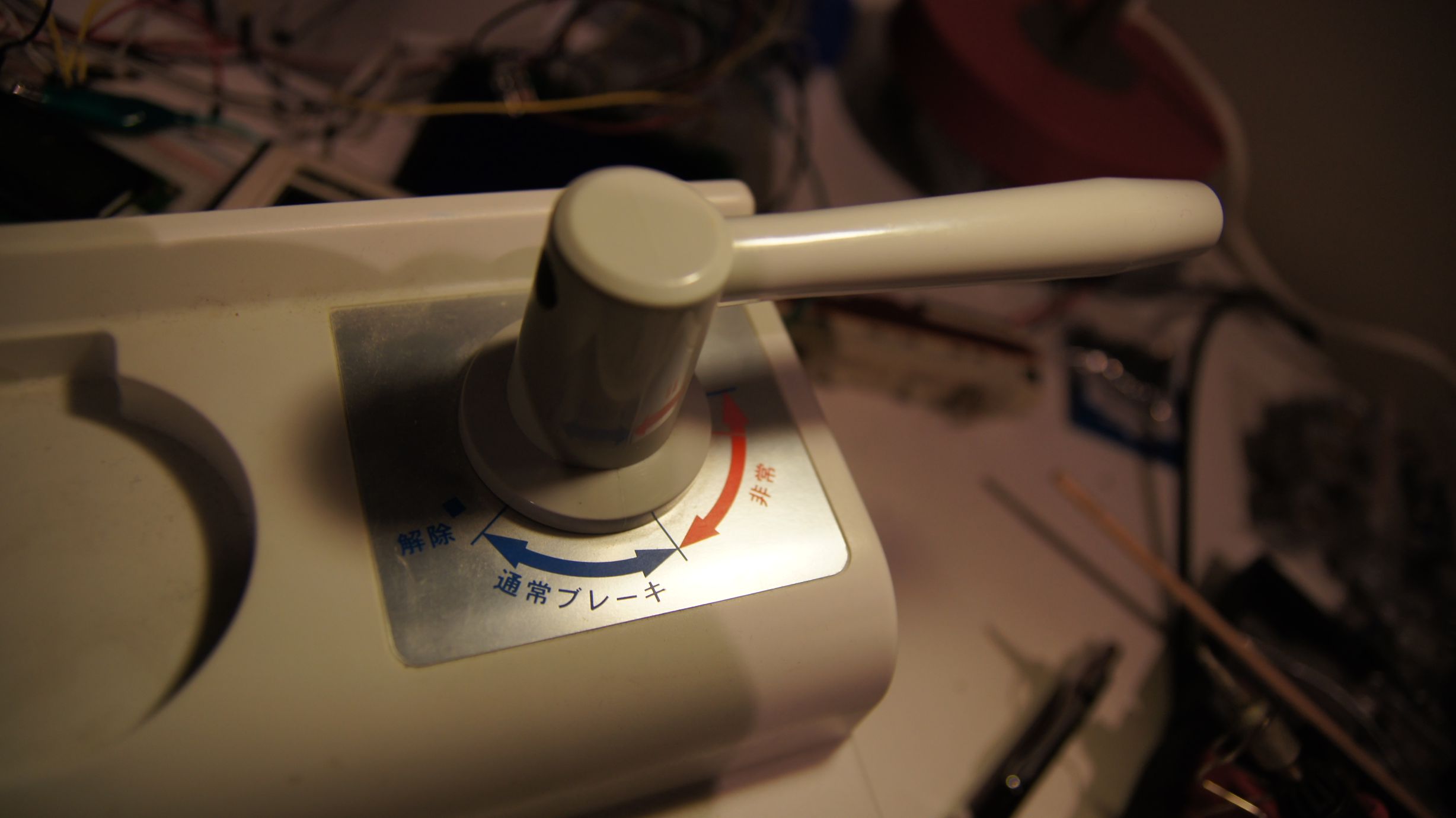
Arduino + Dreamcast Densha-De-Go Controller
I've had Densha-De-Go and the controller for the Dreamcast for a while now... I'd even invested a few hours in playing the actual game, but the accuracy required is crazy. Supposedly in Japan it's that realistic that even real train drivers have a hard time getting it spot on :)
Anyway, I'd wanted to get this going for train control for a while after managing to make a Wii Nunchuck control my trains.



You can find more information on the controller at SEGA Retro, SEGAGAGA Domain, Wikipedia, Play Asia and genki Video Games.
Previous attempts
Quite a few months ago I spent a few hours with my Densha-De-Go controller and my Arduino Mega in an attempt to get them to communicate. The goal was to be able to read the controller and then use it to control my model railroad. Unfortunately, I was doing this blind, running off information from Marcus Comstedt's 'Dreamcast Programming' site; specifically his breakdown of the Maple Bus Protocol.
I ended up with nothing working and sent out a few pleas for help on the Arduino forum and to Marcus himself. I received information regarding the fact that it should work (the Arduino had the horsepower), but I would have to ensure the timing was intricate and that the Arduino was always ready to receive data.
I then posted to the Arduino Forum for help. A few months later WzDD came to my rescue with word that he had successfully made the Arduino communicate with a Dreamcast Controller. I hadn't had much time up until now to work on this, and WzDD hadn't done any further work on it, so I took it that he just wanted to prove the concept and that I'd have to get off my backside to make things progress further. In the end, I did want to get my controller functioning.
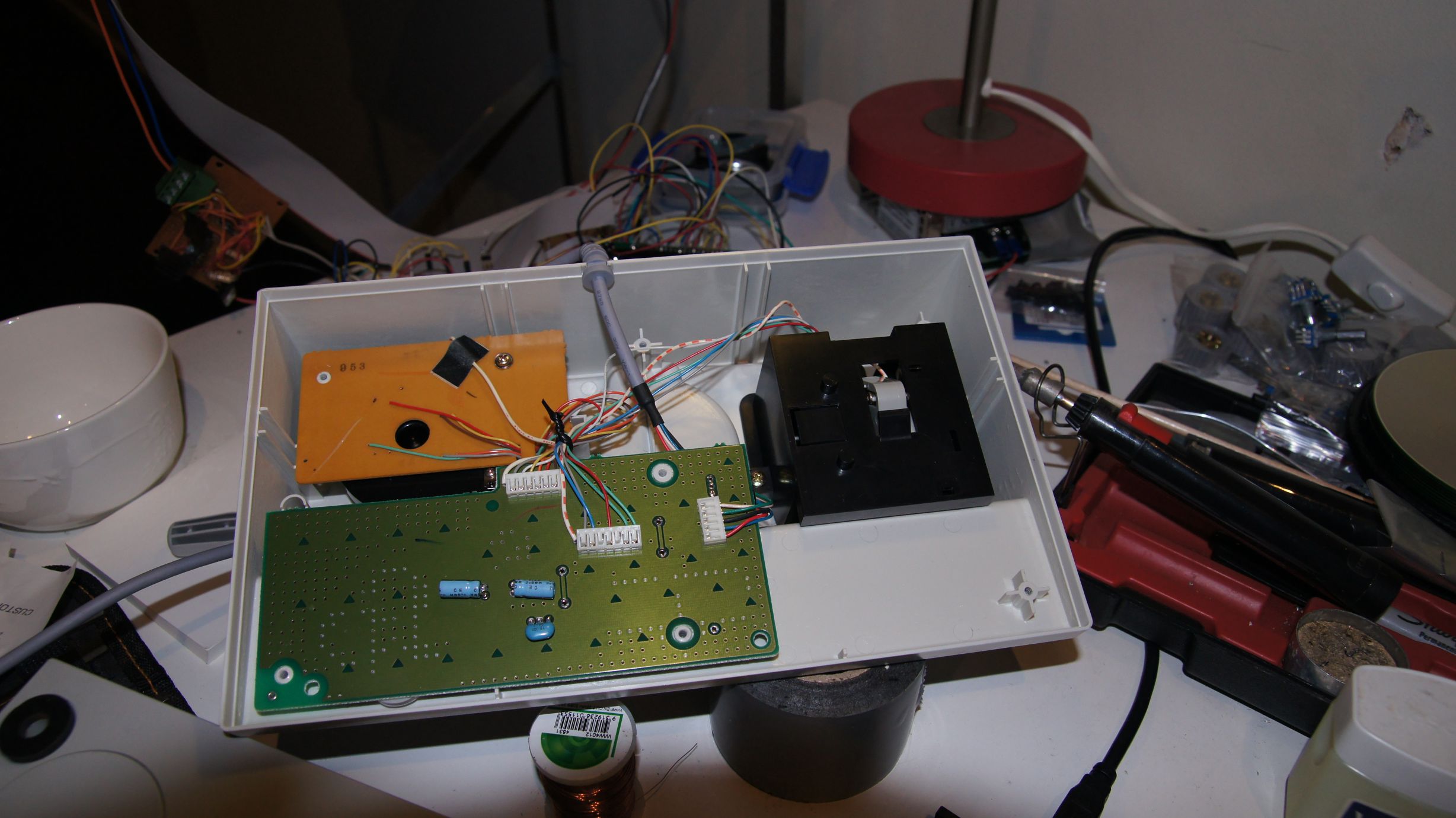
I had previously had everything I needed to test this again, so I gave it another go. My previous setup was a cut-in-half Dreamcast controller extension cable and my Densha-De-Go controller. The extension cable meant I didn't have to hack around with the actual controller or port imitation.
Getting set up...
Due to the requirement to use assembler for the actual low-level controller interactions, we cannot use the Arduino IDE and must use WinAVR (or just avrdude on Linux.) Download this from here (select the latest version) and install to the default directory.
You then need to download the arduino-maple source code and extract somewhere locally. I've put the folder on C:\arduino-maple\.
Open Programmers Notepad [WinAVR] from the start menu and then open the arduino-maple.cpp file from where it has been extracted. (C:\arduino-maple\arduino-maple.cpp in my case.)
If all is installed correctly, then you should be able to choose Tools - [WinAVR] Make All and have the following output in the output window:
> "make.exe" all
avr-gcc -Wall -g2 -gstabs -Os -fpack-struct -fshort-enums -ffunction-sections -fdata-sections -ffreestanding -funsigned-char -funsigned-bitfields -mmcu=atmega328p -DF_CPU=16000000UL -I./arduino -c arduino/pins_arduino.c -o build/arduino/pins_arduino.o
In file included from arduino/wiring_private.h:30,
from arduino/pins_arduino.c:26:
c:/winavr-20100110/lib/gcc/../../avr/include/avr/delay.h:36:2: warning: #warning "This file has been moved to <util/delay.h>."
...
Lots of warnings, no errors...
...
avr-g++ -Os -Wl,-gc-sections -mmcu=atmega328p build/arduino/pins_arduino.o build/arduino/WInterrupts.o build/arduino/wiring.o build/arduino/wiring_analog.o build/arduino/wiring_digital.o build/arduino/wiring_pulse.o build/arduino/wiring_shift.o build/./arduino-maple.o build/arduino/HardwareSerial.o build/arduino/Print.o build/arduino/Tone.o build/arduino/WMath.o build/arduino/WString.o build/./libmaple.o -o app.elf
avr-objcopy -R .eeprom -O ihex app.elf app.hex
avr-size --format=avr --mcu=atmega328p app.elf
AVR Memory Usage
----------------
Device: atmega328p
Program: 3380 bytes (10.3% Full)
(.text + .data + .bootloader)
Data: 796 bytes (38.9% Full)
(.data + .bss + .noinit)
> Process Exit Code: 0
> Time Taken: 00:02
Now, as you can see above... that's not my Arduino! I have an Arduino Mega and therefore we need to adjust the Makefile correctly for my setup. Here you'll need to know the CPU code, interface type and the port number. Also make sure you change the upload task to program so that we can use the menu items in WinAVR.
# Makefile for building small AVR executables, supports C and C++ code # Author: Kiril Zyapkov # Hacked up by nfd SOURCE_DIRS = . arduino INCLUDE_DIRS = arduino MMCU = atmega1280 F_CPU = 16000000UL SRC_ROOT = . BUILD_DIR = build CFLAGS = -Wall -g2 -gstabs -Os -fpack-struct -fshort-enums -ffunction-sections \ -fdata-sections -ffreestanding -funsigned-char -funsigned-bitfields \ -mmcu=$(MMCU) -DF_CPU=$(F_CPU) $(INCLUDE_DIRS:%=-I$(SRC_ROOT)/%) CXXFLAGS = -Wall -g2 -gstabs -Os -fpack-struct -fshort-enums -ffunction-sections \ -fdata-sections -ffreestanding -funsigned-char -funsigned-bitfields \ -fno-exceptions -mmcu=$(MMCU) -DF_CPU=$(F_CPU) $(INCLUDE_DIRS:%=-I$(SRC_ROOT)/%) LDFLAGS = -Os -Wl,-gc-sections -mmcu=$(MMCU) #-Wl,--relax TARGET = $(notdir $(realpath $(SRC_ROOT))) CC = avr-gcc CXX = avr-g++ OBJCOPY = avr-objcopy OBJDUMP = avr-objdump AR = avr-ar SIZE = avr-size SRC = $(wildcard $(SOURCE_DIRS:%=$(SRC_ROOT)/%/*.c)) CXXSRC = $(wildcard $(SOURCE_DIRS:%=$(SRC_ROOT)/%/*.cpp)) ASMSRC = $(wildcard $(SOURCE_DIRS:%=$(SRC_ROOT)/%/*.S)) OBJ = $(SRC:$(SRC_ROOT)/%.c=$(BUILD_DIR)/%.o) $(CXXSRC:$(SRC_ROOT)/%.cpp=$(BUILD_DIR)/%.o) $(ASMSRC:$(SRC_ROOT)/%.S=$(BUILD_DIR)/%.o) DEPS = $(OBJ:%.o=%.d) $(BUILD_DIR)/%.o: $(SRC_ROOT)/%.c $(CC) $(CFLAGS) -c $< -o $@ $(BUILD_DIR)/%.o: $(SRC_ROOT)/%.S $(CC) $(CFLAGS) -c $< -o $@ $(BUILD_DIR)/%.o: $(SRC_ROOT)/%.cpp $(CXX) $(CXXFLAGS) -c $< -o $@ all: app.hex printsize #$(TARGET).a: $(OBJ) # $(AR) rcs $(TARGET).a $? app.elf: $(OBJ) $(CXX) $(LDFLAGS) $(OBJ) -o $@ $(BUILD_DIR)/%.d: $(SRC_ROOT)/%.c mkdir -p $(dir $@) $(CC) $(CFLAGS) -MM -MF $@ $< $(BUILD_DIR)/%.d: $(SRC_ROOT)/%.cpp mkdir -p $(dir $@) $(CXX) $(CXXFLAGS) -MM -MF $@ $< #$(TARGET).elf: $(TARGET).a # $(CXX) $(LDFLAGS) $< -o $@ app.hex: app.elf $(OBJCOPY) -R .eeprom -O ihex $< $@ clean: echo $(RM) $(DEPS) $(OBJ) $(TARGET).* printsize: avr-size --format=avr --mcu=$(MMCU) app.elf # Programming support using avrdude. Settings and variables. PORT = /dev/tty.usbserial-A700ekGi #PORT = /dev/ttyUSB0 AVRDUDE_PORT = com3 AVRDUDE_WRITE_FLASH = -U flash:w:app.hex MCU = atmega1280 AVRDUDE_PROGRAMMER = stk500v1 #AVRDUDE_FLAGS = -V -F -C \app\arduino-0021\hardware\tools\avr\etc\avrdude.conf AVRDUDE_FLAGS = -V -F \ -p $(MCU) -P $(AVRDUDE_PORT) -c $(AVRDUDE_PROGRAMMER) \ -b $(UPLOAD_RATE) UPLOAD_RATE = 57600 # # Program the device. INSTALL_DIR = \app\arduino-0021 AVRDUDE = avrdude program: app.hex #python pulsedtr.py $(PORT) $(AVRDUDE) $(AVRDUDE_FLAGS) $(AVRDUDE_WRITE_FLASH)
The first line in the program target (Line 93) 'pushes' the reset button on the Arduino. As we don't have Python installed we have to do this manually. So, build the source code via the [WinAVR] Make All and ensure there are no errors. Now press the 'reset' button on the Arduino and then quickly choose Tools - [WinAVR] Program. If all goes correctly then you'll see the code uploading to your Arduino:
#python pulsedtr.py /dev/tty.usbserial-A700ekGi
avrdude -V -F -p atmega1280 -P com3 -c stk500v1 -b 57600 -U flash:w:app.hex
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100% 0.05s
avrdude: Device signature = 0x1e9703
avrdude: NOTE: FLASH memory has been specified, an erase cycle will be performed
To disable this feature, specify the -D option.
avrdude: erasing chip
avrdude: reading input file "app.hex"
avrdude: input file app.hex auto detected as Intel Hex
avrdude: writing flash (3508 bytes):
Writing | ################################################## | 100% 1.09s
avrdude: 3508 bytes of flash written
avrdude done. Thank you.
> Process Exit Code: 0
> Time Taken: 00:03
And that's it, our the compiled code for the arduino-maple project is now on the Arduino and running!
Using the Python code on Windows
I lied, I said I didn't have Python installed... but I ended up installing it anyway. The job to convert the Python code to C# was going to take too long and, to prevent a debugging nightmare, I decided I would get the known-to-work Python code going under Windows first. So, I installed Python from the official website and then started learning :)
Note that I downloaded and installed Python Version 2.6.6 as this was the version that would have been available when arduino-maple was created.
After selecting 'IDLE' from the start menu, I was presented with a light-weight GUI. I opened up the 'maple.py' that's included with the arduino-maple code and attempted to compile it.
I had problems at the start, as in the included Makefile there are two declarations of CPU type. Initially I hadn't set these both correctly and the Arduino includes were not correctly compiled... make sure you carry out a proper clean whenever changing code; this includes manually deleting all of the .o files.
Once this was sorted, it all finally worked... sort of?
connecting to COM3: connected SENT: 0000200121 No device found at address: 0x20 SENT: 0000010100 1c20000501000000ff0f3f000000000000000000415400ff204f544920313030746e6f436c6c6f7 2202072652020202020200024191bdc94191958dd481e508815481c9bdc99591b98da5308195 cdb995bdc91881154c8c9b40481051d491551394d25494130b14d1480b911508080808007d00371 117 Command 5 sender 0 recipient 20 length 1c Device information: Functions : CONTROLLER Periph 1 : 0x3f0fff Periph 2 : 0x0 Periph 3 : 0x0 Name : ..TAITO 001 Controller $. License : .....X...P.H..H..Y...S....\....[..T.....Q.I.I%M9M.0A.......P Power : 53251 Power max : 32775 Play with the controller. Hit ctrl-c when done. SENT: 010020090100000029 SENT: 010020090100000029 1111101010011111 SENT: 010020090100000029 1111101010011111 SENT: 010020090100000029 1111101010011111 SENT: 010020090100000029 1111101010011111
Timing issues
As I continued to run the code, I would get random results as to the 'Name', 'License' and 'Power' fields... well, it was obvious in the text fields that there were problems, but I had no idea that what the 'Power' fields were meant to read. Either way, this indicated a timing issue somewhere and I guessed that life was about to get difficult. Note that I had always been running the controller at 5v, as that's what WzDD's post said the blue wire should be connected to, but it turns out that the device should have actually been running on 3.3v.
Unfortunately, setting the controller on to 3.3v didn't change anything... the responses were still mildly random. The buttons would be sent though correctly (apart from the B button) but the initial device description would come through jumbled. I took a few samples of the data and realised that the data would always have a minimal length. To me this meant that we weren't missing bytes/bits, but actually reading too many. The analysis showed that there were similar chunks all the way through, but at certain intervals there'd be extra/changed characters. Based on Marcus Comstedt's Maple Bus information, I guessed that we were re-reading bits too quickly and needed to slow down a little... This would mean slowing down the pin reading in WzDD's arduino-maple assembler code.
In the maple_rx_raw: function down near _rx_loop:, the code iterates through the pins hoping to read the data. It initially checks the state of the pins to sense when the controller is about to send data, but this did not have the final check for the second pin going low.
4: IN rport2, _SFR_IO_ADDR(PINB) BST rport2, bitmaple5 ; maple5 BRTS 4b ; must be low now
The above code was added around line 305 to ensure this check was in. I then also 'spaced' out the store/read calls by placing a delay in. WzDD had already written the delayquarter macro and I simply re-used this.
... _rx_store rport bitmaple5 5 _rx_read bitmaple5 delayquarter _rx_store rport bitmaple1 4 _rx_read bitmaple1 ...
After these two changes, the text from the device information call worked flawlessly. But my B button still didn't work. I decided the B button wasn't important at this stage and went on to decoding the controller to work out how the levers functioned.
Densha-De-Go controller workings
So, after having used the standard Dreamcast controller to play hours-upon-hours of Shenmue, Shenmue II and Chu chu rocket, I would have expected at least one of the levers on the Densha-De-Go controller to use the analog joystick and the other to also use some form of analog control. After a few minutes decoding the controls, it became apparent that they simply used the buttons available (up, down, left, right, x, y, z) in a binary-value style configuration.
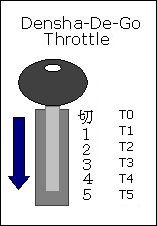
| Throttle Position | X | Y | Z |
|---|---|---|---|
| T0 | [x] | [x] | |
| T1 | [x] | [x] | |
| T2 | [x] | ||
| T3 | [x] | [x] | |
| T4 | [x] | ||
| T5 | [x] |
| Other Buttons | Mapping |
|---|---|
| SELECT | D |
| START | START |
| A | A |
| B | ?? |
| C | C |
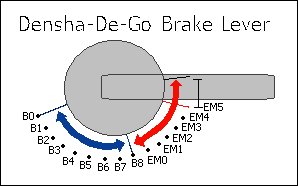
| Brake Position | UP | DOWN | LEFT | RIGHT |
|---|---|---|---|---|
| B0 | [x] | [x] | [x] | |
| B1 | [x] | [x] | [x] | |
| B2 | [x] | [x] | ||
| B3 | [x] | [x] | [x] | |
| B4 | [x] | [x] | ||
| B5 | [x] | [x] | ||
| B6 | [x] | |||
| B7 | [x] | [x] | [x] | |
| B8 | [x] | [x] | ||
| EM0 | [x] | [x] | ||
| EM1 | [x] | |||
| EM2 | [x] | [x] | ||
| EM3 | [x] | |||
| EM4 | [x] | |||
| EM5 | - | - | - | - |
In between the B's there is a slight overlap of the buttons, where the current and next 'combination' is combined, but this doesn't seem to last more than one cycle.
In between the EM's the controller reads UP-DOWN-LEFT-RIGHT. This area exists between all EM's and B8-EM0 and seems to be about 3mm wide.
Controlling trains
Now it was time to get this incorporated into my original train throttle. I didn't want to have to use the Python code, so instead I 'crafted' the packets into the Arduino code.
//here is a quick packet to request device information from controller 'one'. //i.e. the only controller connected. packet.header[0] = 0; // Number of additional words in frame packet.header[1] = 0; // Sender address = Dreamcast packet.header[2] = (1 << 5); //(1 << 5); // Recipient address = main peripheral on port 0 packet.header[3] = 1; // Command = request device information packet.data[0] = 0x21; //checksum packet.data_len = 5; //send the above packet to initiate comms with the controller. maple_transact();
I'm going to gloss over this part pretty quickly, as this post was more about getting the Dreamcast controller usable rather than another lesson in physics and model railway throttles. For the code, I ended up just deciphering the packet that comes back from the controller, working out what the throttle position is and then adjusting the target speed. The main program loop then makes then increment/decrements the current speed to eventually match the target speed. This provides a very simple form of acceleration.
void control_throttle(void) {
//quick hack, should actually do a binary 'and'
//packet data[6] contains the throttle position, so use this to gauge
//voltage output to pin 7 (or speed)
switch (packet.data[6]) {
case 0xF9: target_speed = 0; t_pos = 0; break;
case 0xFA: target_speed = 88; t_pos = 1; break;
case 0xFB: target_speed = 96; t_pos = 2; break;
case 0xFC: target_speed = 140; t_pos = 3; break;
case 0xFD: target_speed = 190; t_pos = 4; break;
case 0xFE: target_speed = 250; t_pos = 5; break;
}
}
The changing of pin 13 below lights the on-board Arduino LED to show once the loop has made the speed match the target speed.
digitalWrite(13, LOW);
if (target_speed > speed) {
//accel
speed += t_pos / 2;
} else if (target_speed < speed) {
//speed += abs(target_speed - speed);
//decel
speed--;
} else {
digitalWrite(13, HIGH);
}
//send the speed to the pin/railway
analogWrite(7, speed);
And then... it just worked :)

 Download the source code here.
Download the source code here.Note that this does not include the Python code; nor will my code correctly interact with the python code anymore. The goal was always to have the Arduino talk to the Dreamcast controller directly.
As you can see, I've only implemented the throttle on the controller... I need to now bring in the brake lever as well, but this is where the physics lesson comes in. I'll be posting again soon enough with source code for acceleration and braking using this controller.
I've got a few ideas as to how to semi-realistically control the train with both levers, but I will need to do a little more reading before I get something going. I do know that in the actual Densha-De-Go game, the game complains when you have both levers on at the same time... and it seems wrong to be doing so... but then again, it'd be like doing a hill-start :) Maybe for freight trains?
If only our model railway trains had gears and could free roll!
Sending full bytes over .NET Serial Ports to the Arduino
Ok, I have just spent a good two nights of my life diagnosing why I could send all bytes up to value '127' and no higher. In hindsight, it all makes perfect sense and the documentation is clear, but when you've been taught to think in strings, you might hit this very quickly.
The Scenario
I have my MAX7219 + LedControl Library set up on my Arduino and all works fine. I use two functions to control it: setLed and setRow. setLed simply takes a boolean to determine if the LED you are pointing at is to be on or off, but setRow requires a byte. This is all fairly straight-forward as each 'row' in the LED matrix has 8 LEDs, and a byte has 8 bits. So, starting from the lowest significant bit, a value of b00000001 will turn on the first LED in a specified row. (i.e. setRow(DEVICE,ROW,BITS);).
All communications between my application and the Arduino had been based on strings and so I had previously been using one character (one byte) to set one LED. Due to this being a complete waste of bandwidth, I decided that each byte I sent through the channel should be a byte to control full row of LEDs. This meant that I could therefore no longer 'see' the output as a string (or ASCII), as the characters I would create from setting the bits may no longer be in ASCII range... this was no big deal, as I could just view the byte values and decode it all myself.
So, on the client end (C#.NET Application) I started encoding the bytes from bit values. This all worked until I tried to set the last bit...
byte b = 1 | (1 < < 7); //let's set the first and last LED. string buffer = (char)b + "\0"; serialPort.WriteLine(buffer);
| Data Sent | LEDs lit | Correct? |
|---|---|---|
| b00000001 | 1st | OK |
| b01010101 | 1st, 3rd, 5th, 7th | OK |
| b10101010 | 1st, 2nd, 3rd, 4th, 5th, 6th | WRONG |
| b10000001 | 1st, 2nd, 3rd, 4th, 5th, 6th | WRONG |
| b01000000 | 7th | OK |
| b10000000 | 1st, 2nd, 3rd, 4th, 5th, 6th | WRONG |
What the hell was going on? That 8th bit is fishy!
The Answer
So, after reading numerous blogs and not finding my answer, I went to the Arduino Forums and posted a topic asking for help. I was given advice to write a very simple test app to work out where the bytes were failing... but I never did get to write that app, instead I went to the MSDN site as soon as I saw that the Write() procedure could be overloaded.
And look what I found at the article on MSDN:
By default, SerialPort uses ASCIIEncoding to encode the characters. ASCIIEncoding encodes all characters greater than 127 as (char)63 or '?'. To support additional characters in that range, set Encoding to UTF8Encoding, UTF32Encoding, or UnicodeEncoding.
And guess what... ASCII Character ? is 63 in decimal and therefore b00111111 in binary!
So, whenever I was setting the 8th bit, the .NET Framework (in all its wisdom) would translate this to a question mark as it was not expecting to send an invalid ASCII character. Ladies and Gentlemen, ASCII is only 7 bits!
The work-around?
byte[] b = new byte[] { 1, 127, 128, 129, 255 }; //let's set the first bit, last bit, etc...
serialPort.Write(b, 0, b.Length);
And then everything just worked. Do not send chars to your port if your receiver wants bytes.
Cheap and easy Streetlights
I'd previously bulk purchased a large amount of LEDs from LED-Switch with the intent to light up my entire model railway. I'd already bought a few of the MAX7219 ICs, which control up to 64 LEDs each, and knew how to control these via the Arduino. My article on the IC and using it was here.
Anyway, streetlights were high on the agenda, as they exist in every town in Japan and, based on a very simple idea, weren't going to be too hard to make. Following are the steps involved with creating the street lights that have been visible in my prior articles.
Ingredients
- 0.25mm Copper winding wire (or as thin as possible.)
- 1.6mm LEDs White/Yellow (as available here)
- Metal tubing for the main pole. (I used '3/64 x .006' brass tubing)
- Soldering iron
- Paint



Construction
Firstly, cut the pole to your desired length. I have to admit here that I never once measured any of the poles and just prototyped one against a reference (in this case it was a standard Greenmax building) and then made them all the same size.



Make sure you take in to account where you will bend the pole and how much extra length will be required. Use a file to smoothen out the ends so that you don't damage the winding wire when fed through.



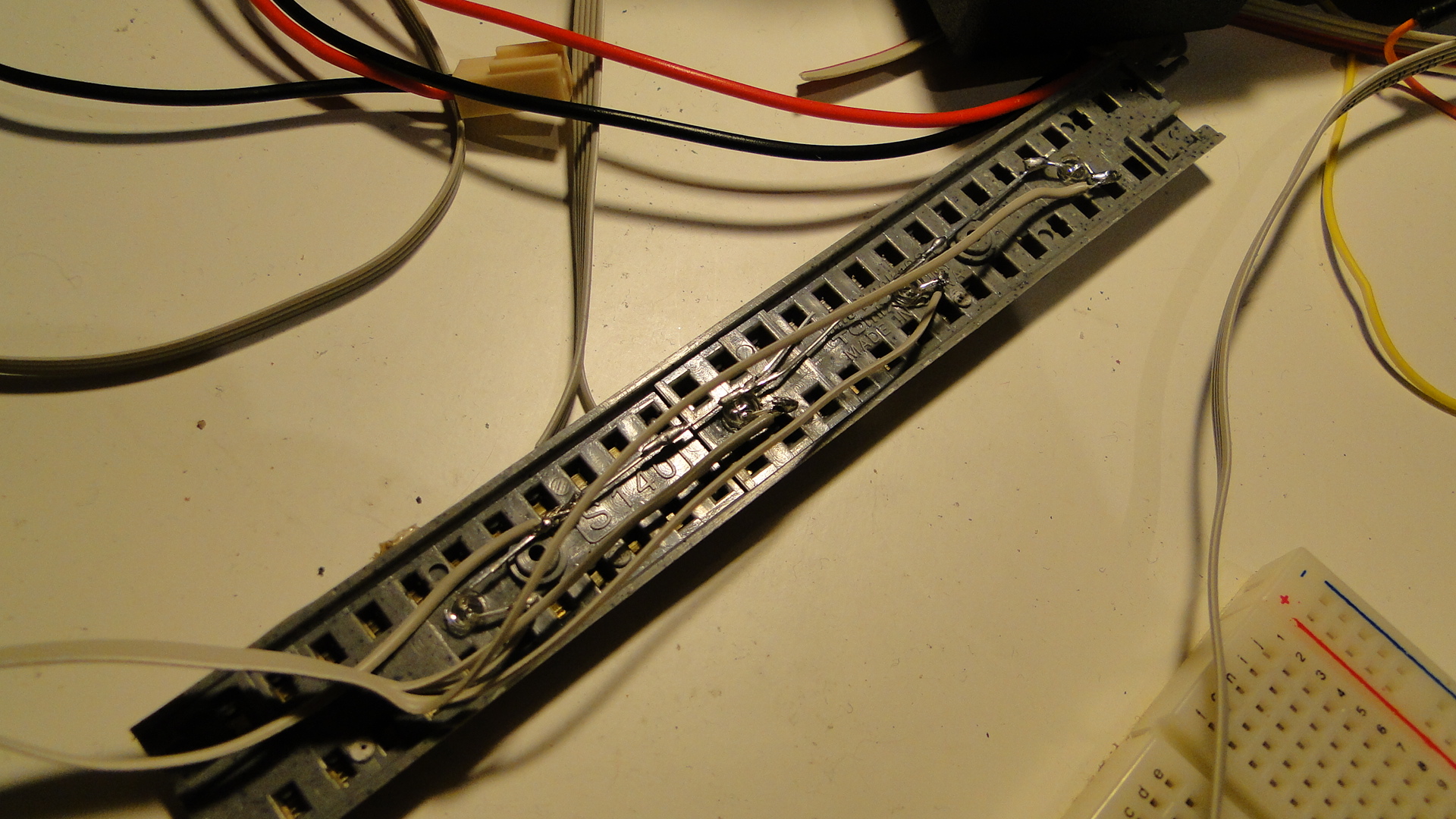
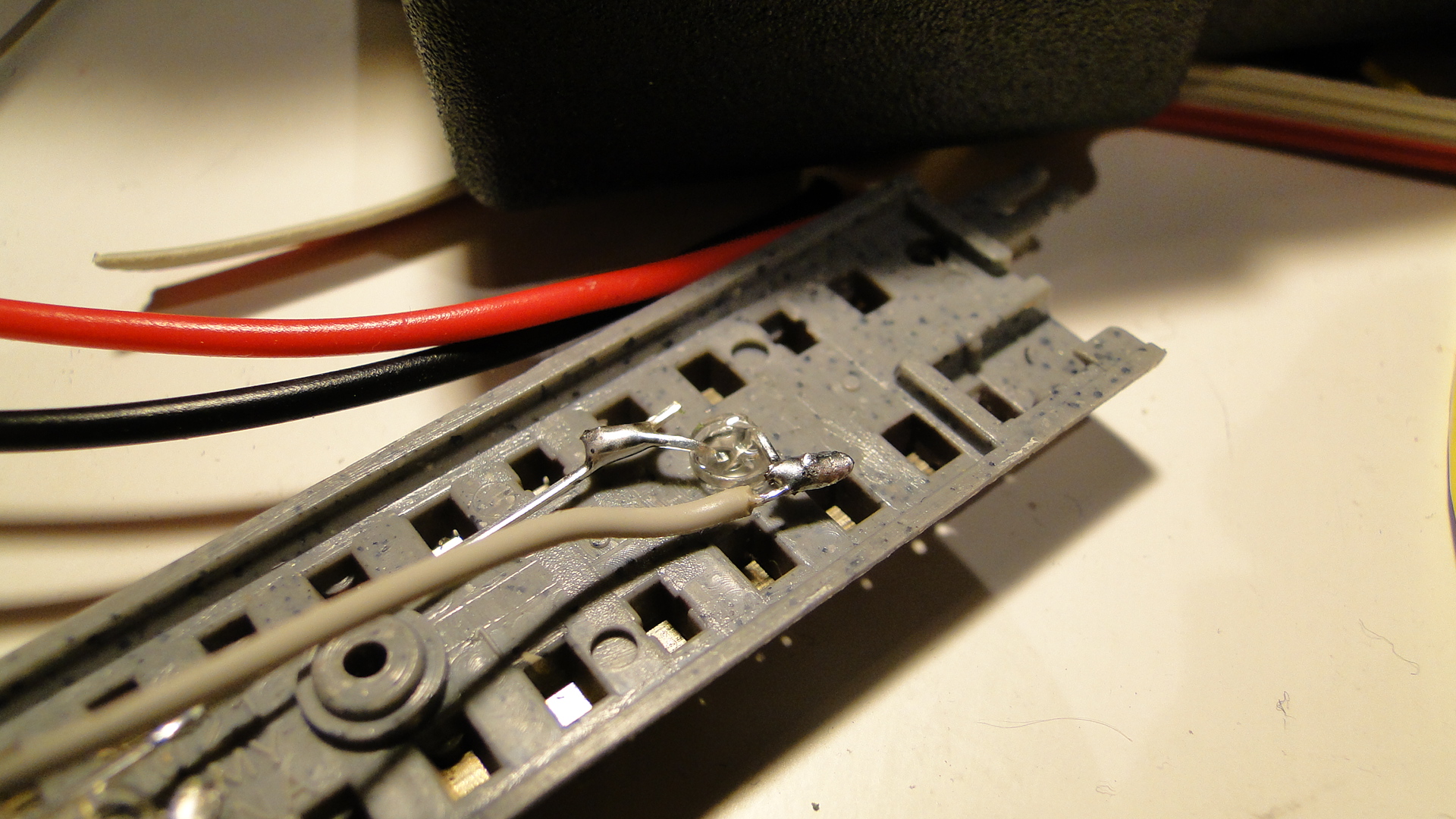
Once you have the poles made, simply cut the leads of the LED right down and solder one end to the pole itself. Finally, if you haven't already, feed the wire through the pole and tin one end (melt it with a little bit of solder to strip away the insulation.) Once done, trim away any excess tinned lead and then solder it to the other lead of the LED.



Note that the final version there was the best I'd made. I'd trimmed the LEDs right down after folding one leg over the top and used a very small amount of solder.
Finished Product
Better night shots of the taller version in action...
The only thing these really require now is some form of cover/compartment/housing for the bulb to live in. Currently, with a big enough blob of paint, I can get the ends to look round-ish enough to look acceptable and I'm happy with this. But any comments/suggestions for an off-the-shelf product that might have the right shape to cover the ends are welcome!
I'd also bought red, yellow and green LEDs and found that they had fit into the Greenmax Signals. I haven't gotten around to finishing them, but I will post another article once done.
Meanwhile, in my previous post, I also added both a red and blue LED to a Bachmann N-Scale Signal. I actually cut it off its usual pole/base and mounted them as shunting signals. See the pictures. I'll post a more detailed explanation along with the other signals once finished.
Latest on the Model Railway
So, something that was just meant to turn into a test layout has now become one of my greatest creations... It's not much as yet, but the scenery and electronics involved is a lot more complex than I thought I would ever create and I'm really glad as to how it's coming along.
Here's a gallery of the initial track plan I intended on using and then 3 evolutions of it. The final layout is not actually listed there. You can see that it started as a single level basic loop, with options for expansion. As I realised the time required for building just this module, I decided to do away with the extension options (although things can always change) and then added a second level. This was just to be a ridge down the middle of the board, but it now has transformed into 1/4 of the overall surface area. A town has now grown on top and a nice siding for single-car vehicles.
Underneath the board is a birds-nest of wiring for all the tricks I've tried with the Arduino (see all the previous posts...) and I'll show you this in a later post.
For now, just check out the photos and I'll get back with more information as I create it. I'm currently working on street lights for the top town and also automation of the points. I've been through around 5 iterations for the control circuit for the points and damaged quite a few TomyTec FineTrack Points in the process. Not fun.
Here's a link to the whole album.
Update: The streetlights are painted and in... I still need to work on the light end, they need some sort of cover/compartment.
Meanwhile, I also need to learn nighttime photography :)
More to come as I light up all of the houses; although one is already lit!
Multiplexing ‘Photodetectors’ to detect train occupancy.
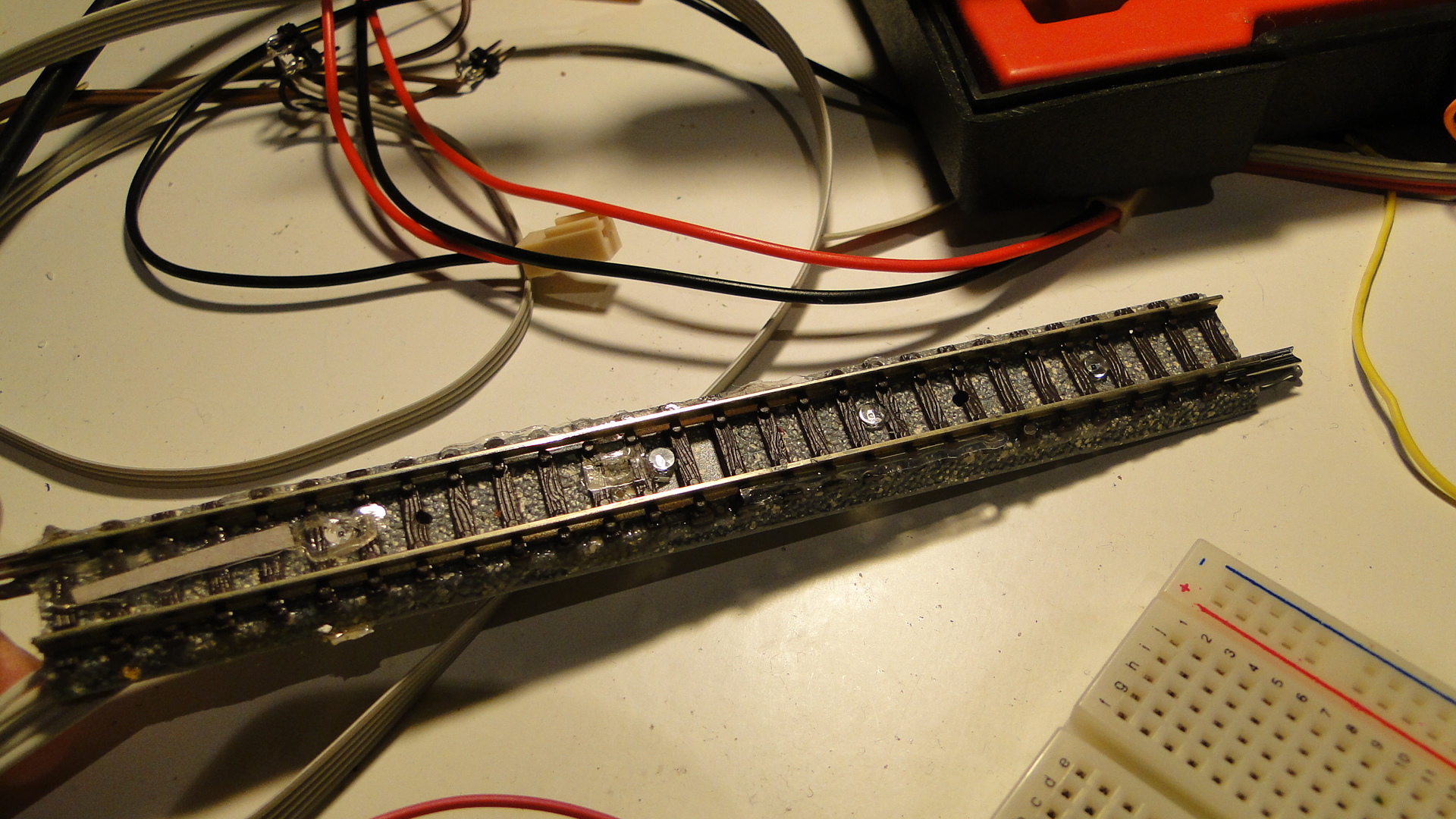
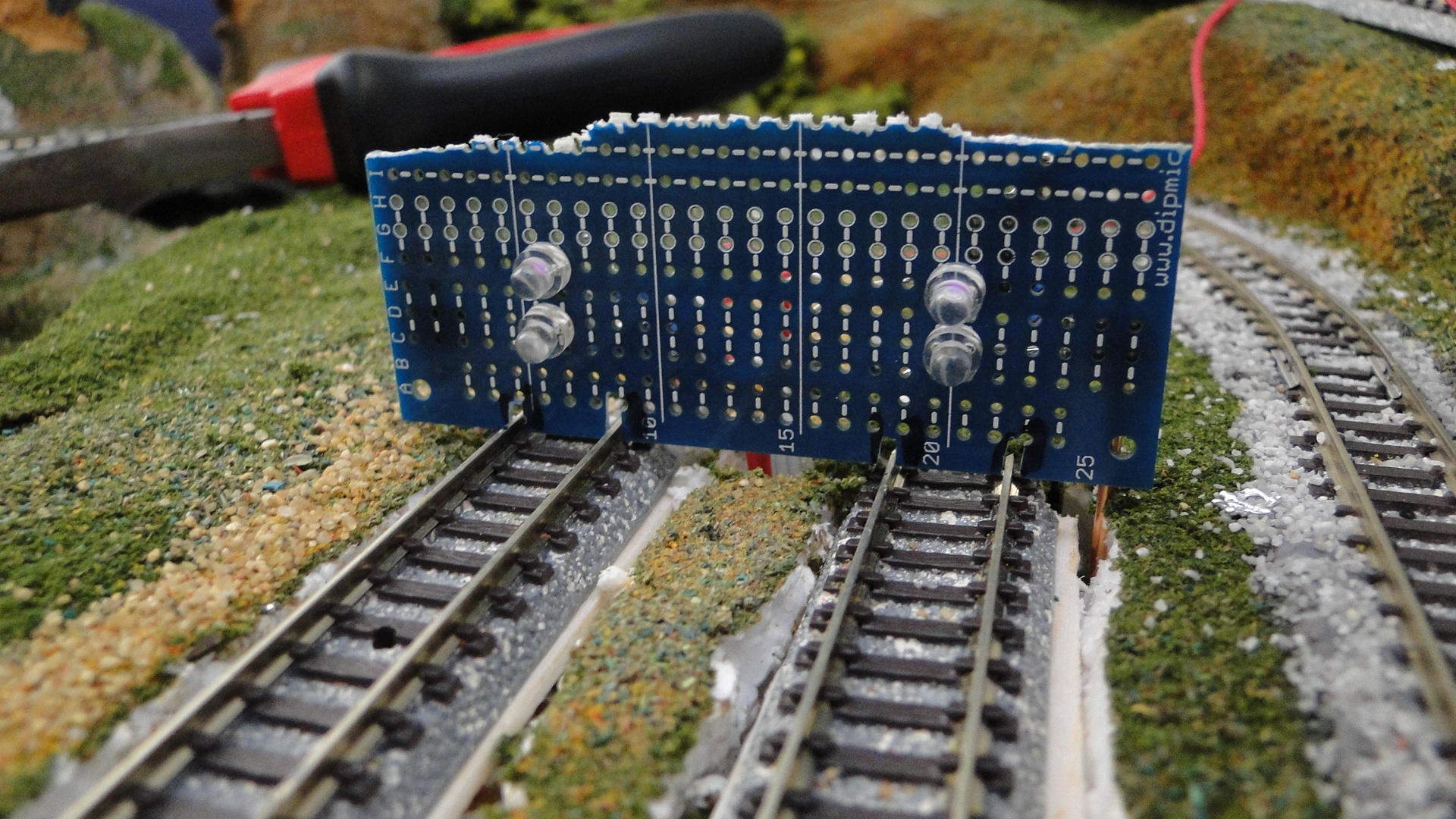
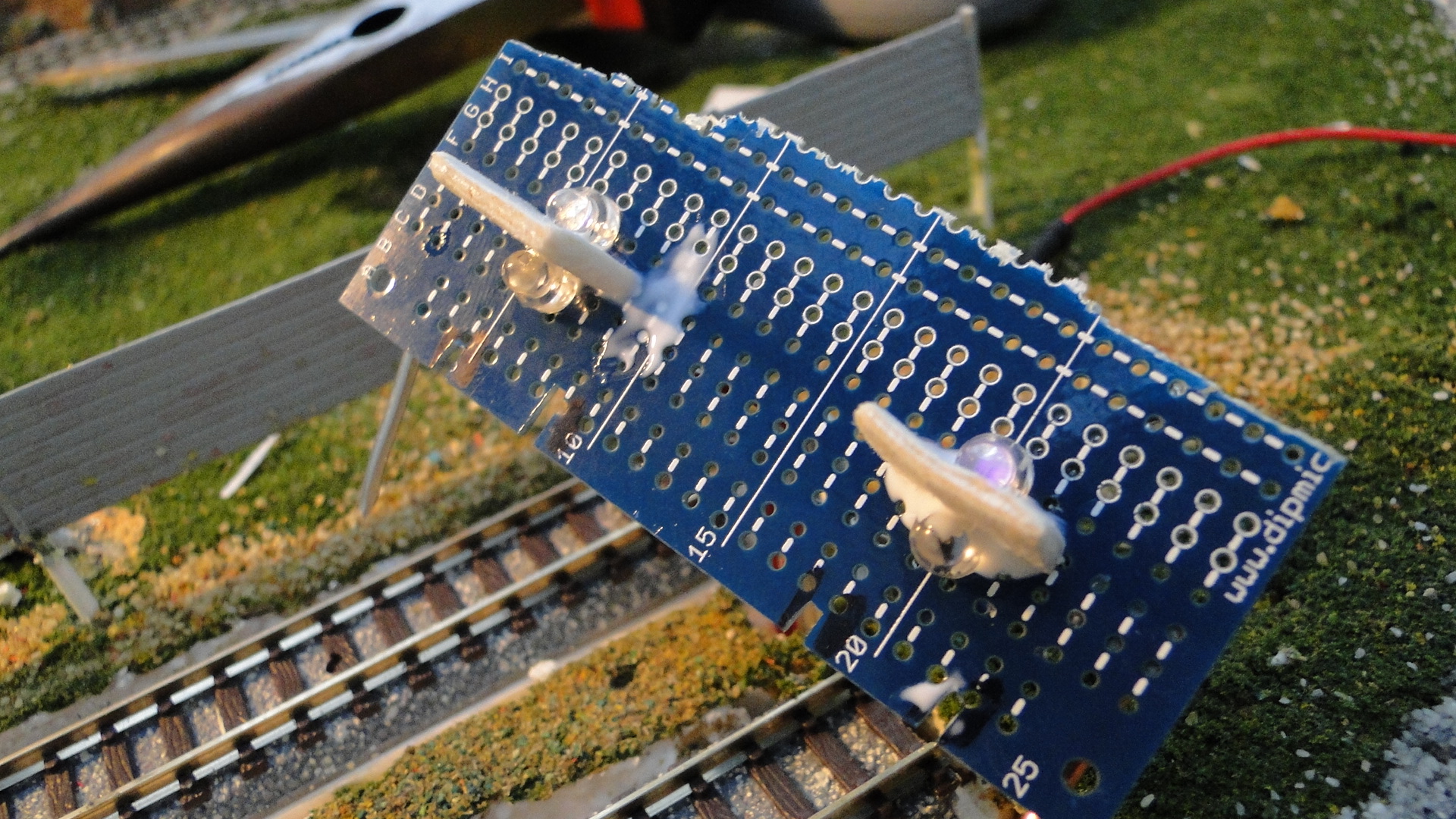
Right, I wasn't impressed whilst using the Sharp distance detectors and so went back to the age-old method of light-detection between the sleepers. As this is N Scale, I didn't want the standard, large and bulky Light Dependent Resistors and went for these smaller 'Photodetectors' found on eBay from a Taiwanese reseller.
These were chosen based on the fact that they have a flat lens/front and are clear. They fit nicely between sleepers of Tomix FineTrack and, since I'd already laid and ballasted my main loop, could be retrofitted by drilling up and through the base.
Now, since I bought these in bulk, I started going crazy and sticking them everywhere I could. The goal was to put one everywhere that would become a good trigger-point for automation. I started with all of my stabling areas and put one at the start, middle and end of the sidings. I would use the 'trigger' from these to know when to slow to an engine to 50% throttle, 25% throttle and then stop. I then also put some in the tunnel entrances, station/platforms and also where signals should probably be (around points.)
It started dawning on me that I would require one analog input pin on my Arduino per photodetector. This would've gotten very expensive very quickly, but then I remembered that there was a simple tutorial on multiplexing analog inputs on the Arduino Playground (based on the 4051 IC). This IC would save me a lot of time and resources: with a little more wiring it could potentially give me 64 analog inputs for a total of 6 digital pins and one analog.
Here's the basic idea of wiring up a single 4051.
Here's how you can use multiple 4051s and reduce pin consumption:
Notes on the options in the above image:
- Option 1: Take the wires in the first rectangle and wire them to one analog pin and three digital. This will give you a total of 8 detector inputs.
- Option 2: Take the 8 analog wires and put them into analog input pins. You then also need to connect up the 3 digital pins. For all inputs you'll only ever need 3 digital pins. But for the analog pins you'll need 1 pin for each 8 inputs. (i.e. 8:1, 16:2, 24:3, 32:4, etc... there is no upper limit, as long as you have the analog inputs.)
- Option 3: Take the single analog pin and then the 6 digital pins. This will give you a total of 64 inputs and will use more digital than analog pins.
As you can see, you can interface with a lot of analog detectors, based on what pins you have available. As you may be aware, analog inputs are more 'expensive' on the Arduino than digital outputs as there are less available.
The process to control the above circuit is to set the digital pins to the desired address and then read the analog pin(s). You then need to set the next address and read the same pin (depending on your setup.) As changing through a lot of inputs and reading can take time, you need to be careful how many detectors you end up implementing. I have no exact numbers; but reading 64 inputs can easily be done in under a second. The goal is to make sure that a train does not pass a detector before it has been read!
So we have our detectors installed and circuitry built; we could now write software to manage it all. The basic idea was to read the value, adjust the min/max of that single detector and then check if it exceeded a threshold. Since these detectors required light to function, they would be effected by the amount of ambient light in the room and therefore the code would need to be smart enough to work out what was 'covered' (i.e. vehicle blocking light) and what was 'open'.
This code was also noted in my previous post where I used the Sharp detectors. These detectors produced a lot of noise and had to be filtered so that my code wouldn't simply trigger when a high/low value broke a threshold.
Here is the basic idea for reading one detector:
read value of detector if (detector value is greater than recorded maximum) then record new maximum value if (detector value is lower than recorded minimum) then record new minimum value if (either min or max has changed) then update range of this detector [max - min] adjust threshold [max - (range*0.25)] end if if (detector value is greater than threshold) then report that this detector is 'active' else report that this detector is 'inactive' end if
Right, so the above concept uses a 25% threshold below the maximum-read-value to see if the value read from the detector is 'active'. It is also constantly updating it's valid reading range so that it can adapt to the environmental changes. The main issue with this concept is that if the environment drastically changes (lights are turned on/off, curtains opened/closed, etc...) then this code would not adapt, as it never has a chance to 'retract' the limits. Therefore the following adjustment needs to be made:
store the last 32 values of detector in circular array read value of detector and push last into array, popping off the first value find the lowest value in the array and store as the minimum extremity find the highest value in the array and store as the maximum extremity if (either min or max has changed) then update range of this detector [max - min] calculate the average from the last 32 read values adjust threshold [average + (max-min*0.10)] end if if (detector value is greater than this threshold) then report that this detector is 'active' else report that this detector is 'inactive' end if
Here you can now see that we only care about the last 32 read values (instead of the max and min since the code was running.) We are also using a new threshold calculation: 10% above the average of the last 32 values. This therefore means that we will receive an active notification if the value increases 10% above the 'stable' value of which we have been observing.
Of course, we are always able to introduce new issues; the above code, if run at processor-speed will read 32 values in under a second and, dependent on environment changes, may well not be able to cope. We therefore need to only test the detector at a specific interval (your mileage (kilometre'age) may vary!) of say, 100ms. This then means that the 32 values are taken over the course of 3.2 seconds. If this doesn't suit, then you can also increase the buffer size or decrease the polling delay.
But I bet you haven't seen the main issue? If a vehicle is stationary on the detector for too long then the range will/should drop to zero and therefore the detector will always be 'active'.
Wait, that would be correct? Wouldn't it?
It would, but it would also then report active for a certain time span until the range had expanded again once the vehicle had moved on. Note this can also be simulated by a long train traversing the detector and blocking the light (even with intermittent gaps of light) for a long period of time.
To prevent this? Adjust the polling delay and the buffer size...
Another good trick for limiting environmental effects is to add lights/LEDs to your layout around the detectors to ensure they always have a good source of UV. That way, when those curtains close, the ranges of your detectors wont drop too low.
What's next... well, what do you want to do with all this new information? You need to read it, pass it to the methods we've described above to filter the data and then act on it. Since we're multiplexing, we need to first tell our 4051 IC(s) which input we want to read and then read it. The following classes operate the multiplexers and detectors:
class DetectorCollection {
private:
struct Detector {
int dValues[32];
int dMax;
int dMin;
int dRange;
int dAverageValue;
int dCurrentValue;
int dThreshold;
int dCurrentIndex;
bool dFullArray;
int dAnalogPin;
int dBitIndex;
bool dIsActive;
} detectors[32];
int numDetectors;
int digPins[3];
public:
DetectorCollection(int _digPin1, int _digPin2, int _digPin3);
bool AddDetector(int _aPin, int _bit);
void UpdateDetector(int detector);
void UpdateAllDetectors();
bool IsActive(int detector);
void DebugInformation(int detector);
int GetCurrentValue(int detector);
};
DetectorCollection::DetectorCollection(int _digPin1, int _digPin2, int _digPin3) {
numDetectors = 0;
digPins[0] = _digPin1;
digPins[1] = _digPin2;
digPins[2] = _digPin3;
}
bool DetectorCollection::AddDetector(int _aPin, int _bit) {
//initialise a detector. the array contains "zero'd" detectors
//by default
if (numDetectors < 32) {
detectors[numDetectors].dAnalogPin = _aPin;
detectors[numDetectors].dBitIndex = _bit;
for (int idx = 0; idx < 32; idx++)
detectors[numDetectors].dValues[idx] = 0;
detectors[numDetectors].dMax = 0;
detectors[numDetectors].dMin = 999;
detectors[numDetectors].dRange = 0;
detectors[numDetectors].dAverageValue = 0;
detectors[numDetectors].dThreshold = 0;
detectors[numDetectors].dCurrentIndex = 0;
detectors[numDetectors].dFullArray = false;
detectors[numDetectors].dIsActive = false;
numDetectors++;
return true;
} else return false;
}
void DetectorCollection::UpdateDetector(int detector) {
//set digital pins
for (int pin = 0; pin < 3; pin++)
digitalWrite(digPins[pin],
((detectors[detector].dBitIndex >> abs(pin-2)) & 0x01) == true ? HIGH : LOW);
//read analog pin.
detectors[detector].dCurrentValue =
analogRead(detectors[detector].dAnalogPin);
detectors[detector].dValues[detectors[detector].dCurrentIndex] =
detectors[detector].dCurrentValue;
//find the lowest and highest values in the array and store as
//the minimum and maximum extremities.
int tempVal, newValue = 0;
bool extremitiesChanged = false;
for (int idx = 0; idx < 32; idx++) {
tempVal = detectors[detector].dValues[idx];
if (tempVal < detectors[detector].dMin || detectors[detector].dMin == 0) {
detectors[detector].dMin = tempVal;
extremitiesChanged = true;
}
if (tempVal > detectors[detector].dMax) {
detectors[detector].dMax = tempVal;
extremitiesChanged = true;
}
//used for average calculated below.
newValue += tempVal;
}
//update range of this detector [max - min]
detectors[detector].dRange =
detectors[detector].dMax - detectors[detector].dMin;
if (newValue > 0) {
if (detectors[detector].dFullArray)
detectors[detector].dAverageValue = newValue / 32;
else detectors[detector].dAverageValue =
newValue / (detectors[detector].dCurrentIndex + 1);
//adjust threshold [average + (max-min*0.10)]
detectors[detector].dThreshold =
detectors[detector].dAverageValue +
(detectors[detector].dRange * 0.35);
//adjust active flag:
detectors[detector].dIsActive =
(detectors[detector].dCurrentValue >
detectors[detector].dThreshold);
}
//finally update the next location to store the next incoming value...
//we're using a circular buffer, so just point to the start of the
//array instead of shifting everything along.
detectors[detector].dCurrentIndex++;
if (detectors[detector].dCurrentIndex >= 32) {
detectors[detector].dCurrentIndex = 0;
//for calculating the average, we need to know once
//we have a full buffer. Once it's full we will always
//have a full set of NUM_READINGS values, otherwise
//we only have as many as dCurrentIndex
detectors[detector].dFullArray = true;
}
}
void DetectorCollection::UpdateAllDetectors() {
for (int d = 0; d < numDetectors; d++) UpdateDetector(d);
}
bool DetectorCollection::IsActive(int detector) {
return detectors[detector].dIsActive;
}
int DetectorCollection::GetCurrentValue(int detector) {
return detectors[detector].dCurrentValue;
}
void DetectorCollection::DebugInformation(int detector) {
Serial.print("Detector: ");
Serial.print(detector);
Serial.print(", APin: ");
Serial.print(detectors[detector].dAnalogPin);
Serial.print(", DBit: ");
Serial.print(detectors[detector].dBitIndex);
Serial.print(", Min: ");
Serial.print(detectors[detector].dMin);
Serial.print(", Max: ");
Serial.print(detectors[detector].dMax);
Serial.print(", Range: ");
Serial.print(detectors[detector].dRange);
Serial.print(", Threshold: ");
Serial.print(detectors[detector].dThreshold);
Serial.print(", Average: ");
Serial.print(detectors[detector].dAverageValue);
Serial.print(", Current: ");
Serial.print(detectors[detector].dCurrentValue);
Serial.print(", FullArray: ");
Serial.print(detectors[detector].dFullArray);
Serial.print(", CurrentIndex: ");
Serial.println(detectors[detector].dCurrentIndex);
/*for (int idx = 0; idx < 32; idx++) {
Serial.print("|");
if (idx == detectors[detector].dCurrentIndex) Serial.print("*");
Serial.print(detectors[detector].dValues[idx]);
}
Serial.println("|");*/
}
And now, use it in your main program. Note I've created custom characters for the Arduino Liquid Crystal library via this website.
#define multiplexerPinBitA 40
#define multiplexerPinBitB 41
#define multiplexerPinBitC 42
#define pwmPin 2
#define dirPin1 3
#define dirPin2 4
#define lcdRSPin 30
#define lcdENPin 31
#define lcdD4Pin 32
#define lcdD5Pin 33
#define lcdD6Pin 34
#define lcdD7Pin 35
#include <LiquidCrystal.h>
LiquidCrystal lcd(lcdRSPin, lcdENPin, lcdD4Pin, lcdD5Pin, lcdD6Pin, lcdD7Pin);
//cool hack! create characters for the LiquidCrystal Library!
//see here: http://icontexto.com/charactercreator/
byte trainCharFrontOn[8] =
{B11111,B10001,B10001,B11111,B10101,B11111,B01010,B11111};
byte emptyChar[8] =
{B00000,B00000,B00000,B00000,B00000,B00000,B11111,B10101};
DetectorCollection dCol = DetectorCollection(multiplexerPinBitA,
multiplexerPinBitB, multiplexerPinBitC);
void setup() {
Serial.begin(9600);
pinMode(multiplexerPinBitA, OUTPUT);
pinMode(multiplexerPinBitB, OUTPUT);
pinMode(multiplexerPinBitC, OUTPUT);
for (int d = 0; d < 24; d++) {
//analogpin is 0, 1, 2 [so DIV 8].
//(where 0 is detectors 1-8, 1 is 9-16 and 2 is 17-24)
//bit is the 0-7 on that analog pin [so MOD 8].
dCol.AddDetector(d/8, d%8);
}
//start a train: direction
digitalWrite(dirPin2, HIGH);
digitalWrite(dirPin1, LOW);
//speed (out of 255 [where ~50 is stopped])
analogWrite(pwmPin, 85);
lcd.createChar(0, emptyChar);
lcd.createChar(1, trainCharFrontOn);
lcd.begin(16, 2);
}
void loop() {
//output to the LCD (16x2) the status of all the detectors:
lcd.clear();
lcd.setCursor(0, 0); //top left
for (int d = 0; d < 16; d++) {
dCol.UpdateDetector(d);
lcd.write(dCol.IsActive(d) ? 1 : 0);
}
lcd.setCursor(8, 0);
for (int d = 16; d < 25; d++) {
dCol.UpdateDetector(d);
lcd.write(dCol.IsActive(d) ? 1 : 0);
}
//we still have 8 characters to draw other stuff... no idea what yet though.
delay(333);
}
And then the detectors in action. Note it was at night time and I'm surprised the result was this good!
Properly reading values from a Sharp GP2D12
Right, my efforts to read an IR Voltage until now have been flawed. It seems that my method of just plugging analogue inputs into my Arduino and expecting a clean reading was pointless. 'Noise' is a huge factor when reading analogue inputs (let alone correct pull-up/down resistors and grounding!) and dirty power supplies + PWM generation circuits really do kill any analogue data floating around.
Before I go into the actual sensors, read the Analogue Input Pin tutorial for the Arduino and also some sample code to read range of Sharp sensor.
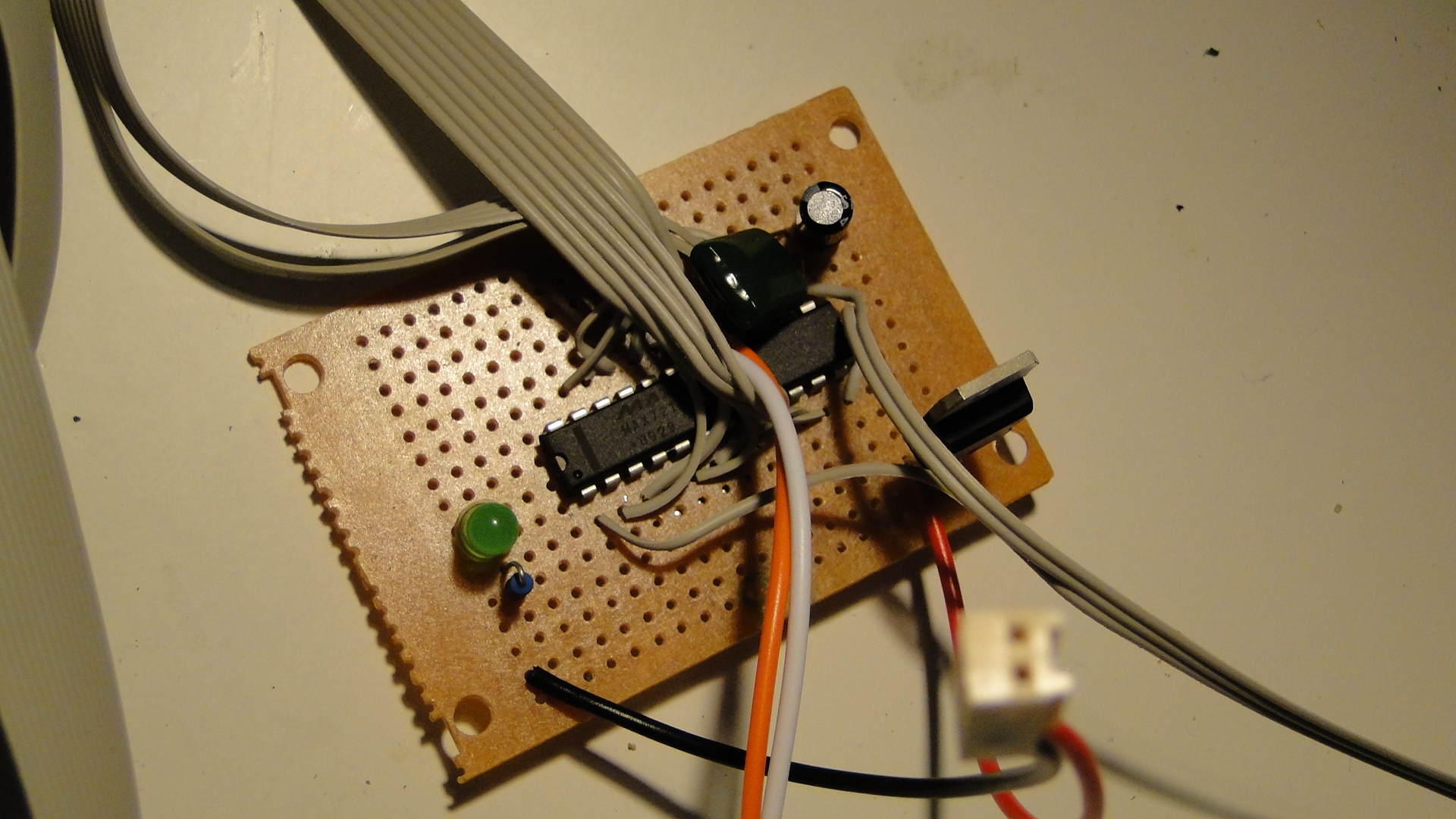
So, how do you sort all these noise issues this out? Capacitors!
Based on the references below... you're either to put a ~22uf Capacitor between Vcc and GND or a 4.7uf Capacitor between Vout and GND. Firstly, here's the references:
Arduino + Sharp Sensors:
- Sharp IR Sensor, bad code? *fixed*
- Ir Distance Sensor Probelm
- Linearizing Code for Sharp GP2D120 Infrared Ranger
Other links on the Sharp sensors:
From all this information above I tinkered further with the sensors; but then proceeded to give up. The readings were much more stable, but I simply couldn't get them to do what I wanted as their values would drop off when the distance between the vehicle and sensor was less than 10cm.
Following is the code I used. Note that it does some trickery with caching the last 20 values and averaging them... I'll explain this all further in my next post.
//LIBRARY
#define NUM_INDEXES 20
class DistanceDetector {
private:
int min_valid;
int max_valid;
int analogPinNumber;
int latest_max_value;
int latest_min_value;
int latest_time_updated;Here is the code I used anyway
int lastIndex;
bool full;
void CalcAverage();
public:
int lastReadValues[NUM_INDEXES];
int sensorValue;
DistanceDetector(int _analogPinNumber);
void UpdateDetector();
};
DistanceDetector::DistanceDetector(int _analogPinNumber) {
min_valid = 100;
max_valid = 600;
lastIndex = 0;
analogPinNumber = _analogPinNumber;
full = false;
for (int idx = 0; idx < NUM_INDEXES; idx++) lastReadValues[idx] = 0;
}
void DistanceDetector::UpdateDetector()
{
int latest_value = analogRead(analogPinNumber);
if (latest_value >= min_valid && latest_value <= max_valid) {
lastReadValues[lastIndex] = latest_value;
CalcAverage();
lastIndex++;
if (lastIndex > NUM_INDEXES) {
lastIndex = 0;
full = true;
}
}
}
void DistanceDetector::CalcAverage() {
sensorValue = 0;
for (int idx = 0; idx < NUM_INDEXES; idx++) sensorValue += lastReadValues[idx];
if (sensorValue > 0) {
if (full) {
sensorValue /= NUM_INDEXES;
} else {
sensorValue /= (lastIndex+1);
}
}
}
//USAGE:
DistanceDetector d1(SENSOR_PIN);
void setup() {
//nothing required, as the constructor takes the pin number.
}
void loop() {
d1.UpdateDetector(); //update the sensor.
Serial.println(d1.sensorValue); //print out the value.
}
Conclusion
I still should have bought the GP2D120! But either way, I've decided to go with standard LDR/IR optics in the track base. Sadly, I'm over attempting the distance detection. My next post will cover a less-visible method for occupancy detection in the sleepers.
InfraRed + Arduino revisited
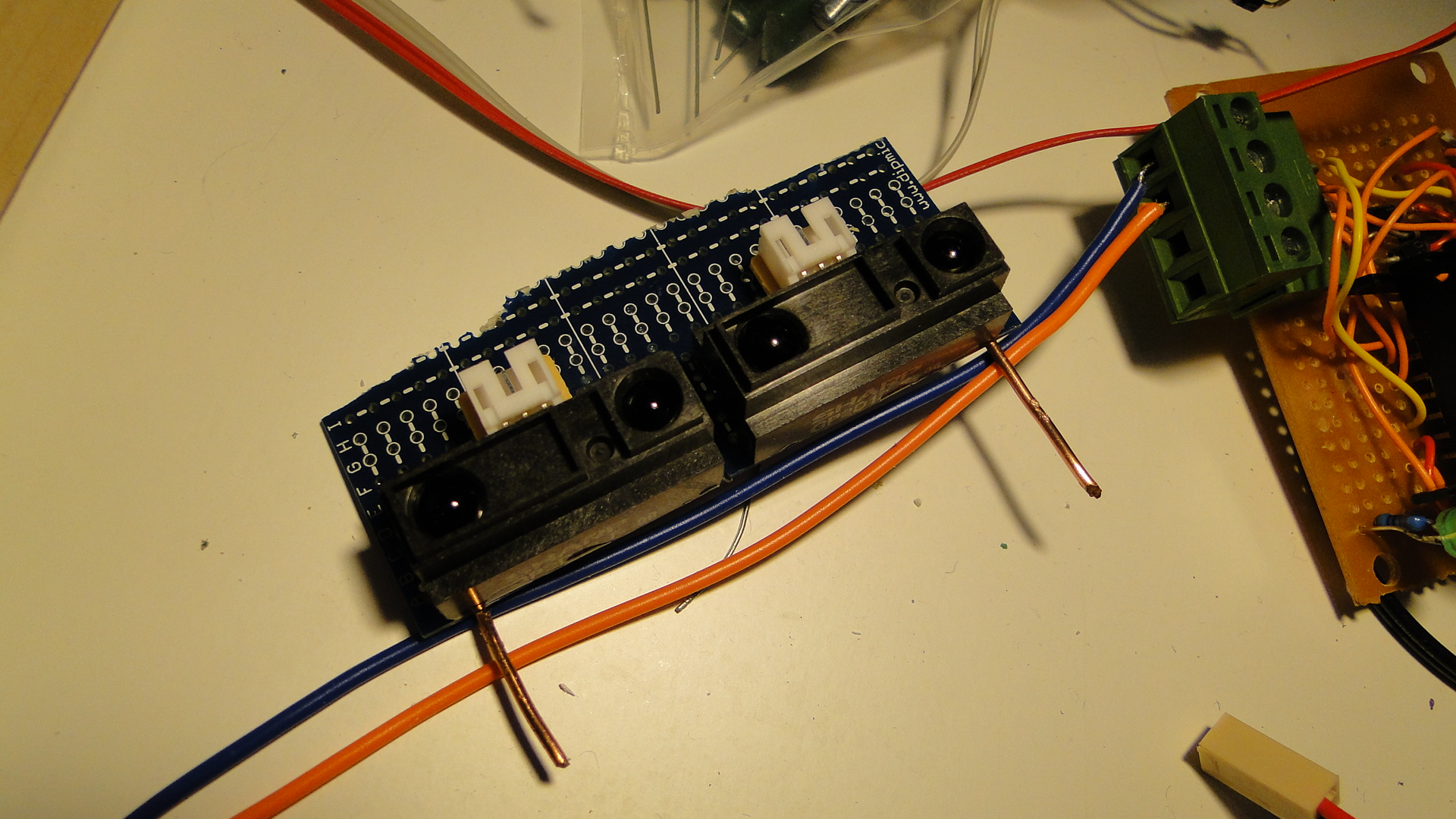
Ok, after failing (more-or-less miserably) with the previous attempt at IR distance detection, I went out and purchased 4 of the Sharp GP2D12 from an eBay Store and put them to work. Finally I had a detection system working, but before this I had also attempted another method using larger IR emitter/detectors that I'd bought from Dip Micro.
Attempt 1: QRD1114, and other smaller IR detectors
See the previous blog post here
Attempt 2: IR Emitter/Detector pairing
Since my previous attempt had failed, I'd decided that if the smaller emitters could not produce enough light to avoid sunlight/roomlight interference, then boosting both the emitter and detector should help. I'd accidently purchased a collection of 10x emitter/collector pairs of IR diodes and so I put these to work in the typical setup and tested them out. These were both 3mm in diameter and, depending on the resistors used, could emit a lot more light (tested via my digital camera.)



The setup was the same as per usual... mounted horizontally at the end of the tracks to ensure that the light would reflect (as much as possible) off the approaching train.
Working with IR at night-time has it's benefits. Your room is usually lit under artificial light and so the amount of IR in the 'air' is low. I therefore had some pretty good results with this setup, but of course, come daylight, everything went out the window (or in the window, as the case may be.) Since this detector was to be in the back of an engine shed, I'd thought that I could block out the windows and make a little dark room, but my detectors were still too unreliable.
This experiment was, in the end, functional, but not to the degree that I'd wanted and so I therefore opted for the off-the-shelf Sharp detector.
Note: The goal here was to use the pair at the end of the track to sense distance. It now seems that the best method will be to detect 'occupation' and I will again test this method with a series of emitter/detector pairs along the track to sense when a train is approaching.
Attempt 3: Sharp GP2D12
After being concerned about sizing and the minimum distance that these detectors would work from, I decided I'd just bite the bullet and try them out.
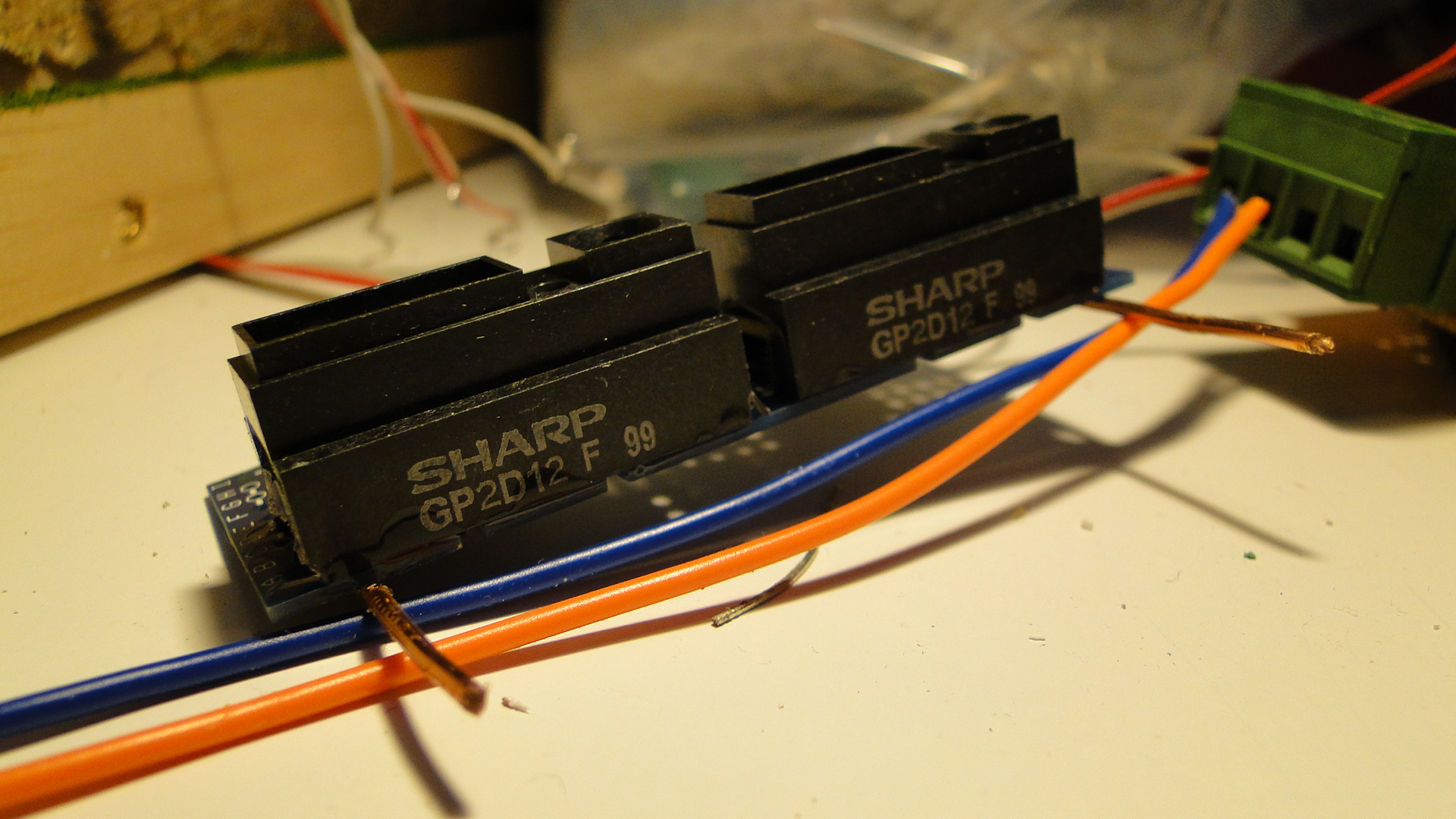
I ended up purchasing 4 quite cheaply on eBay and they arrived from the UK in a short amount of time. I then realised that the versions I'd bought were optimised for detection between 10cm and 70cm. This really sucks, as I'd want the range to be much closer to the detector, as 10cm is a long way for a no-detection zone. I then looked at the graphs showing the voltage compared to distance:
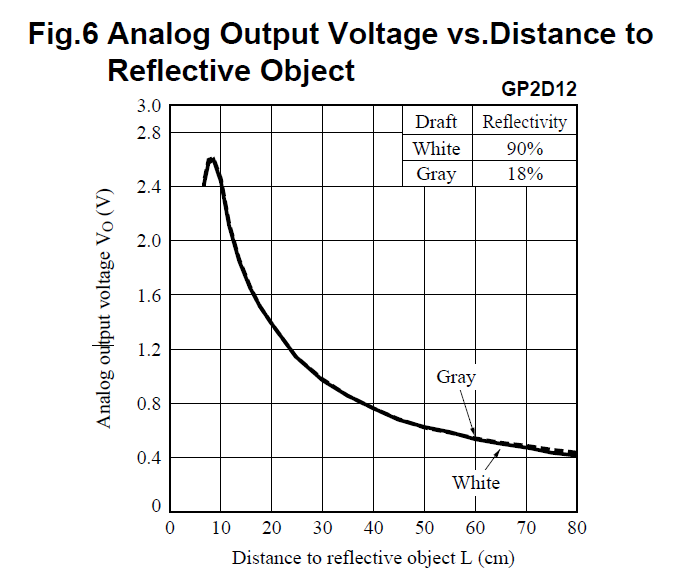
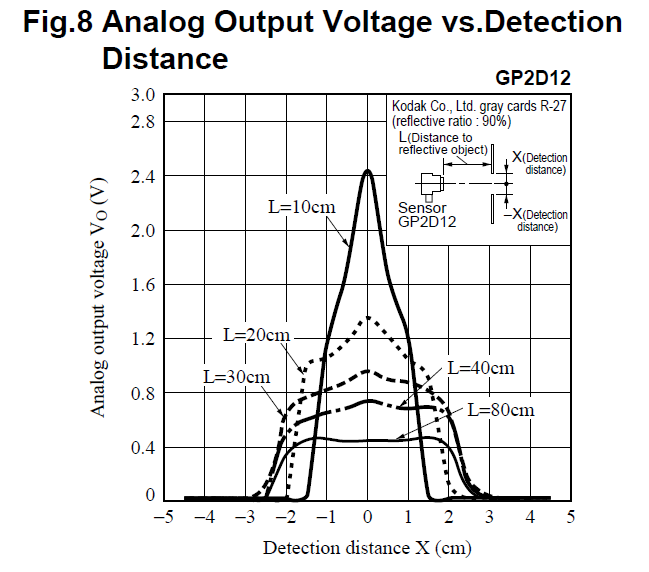
It turns out that this datasheet shows you the comparison of the various detectors that Sharp makes. There seems to be one detector better suited for my project, but.. as they say... hindsight is a bitch. Even worse is that Toys Downunder currently has them in stock!
Although the 'optimum' detecting distance for unit is around 10cm, the detector still gives valid voltage results right down to around 3cm. The only issue here is that the voltage difference is not always increasing! I therefore have to take the value and use it in different scenarios (i.e. when cruising, braking, stopped, etc...)
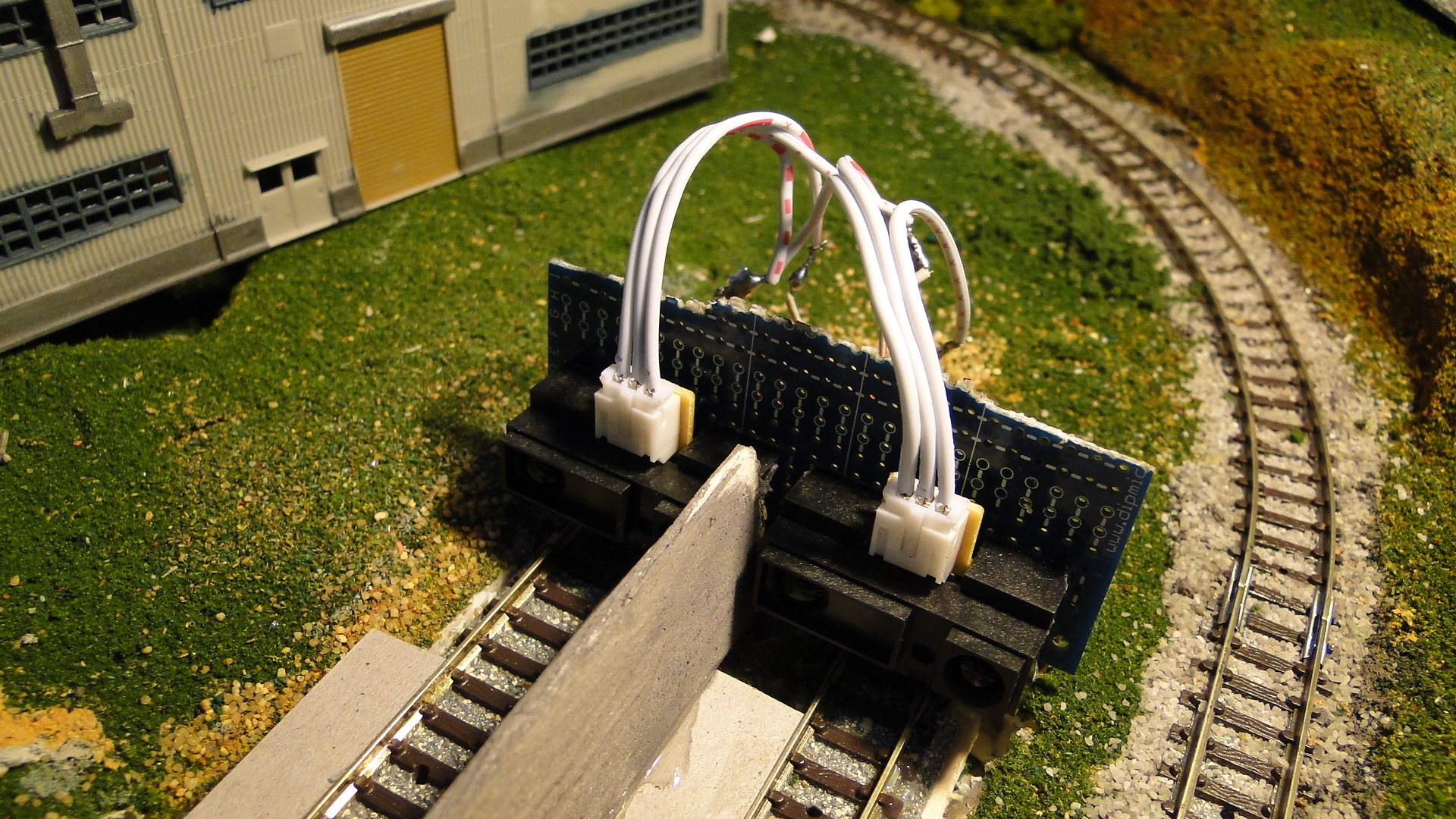
The setup was the same as usual:

So, to deal with this, I needed to work on the voltage change... in steps of around 0.25v. If you happen to implement this yourself, you'll notice straight away that the voltage returned by this unit is not constant when the vehicle is stopped or approaching... it's perpetually flitting around +-0.5v and this can be a real nightmare. Due to this I only choose to detect larger changes which means only reading the sensor if it is +-25 of the current read value.
The basic idea is to determine the deceleration of the vehicle dependent on it's distance from the wall. The final testing code is listed next. Note that this also contains my multiplexer, thottle and also an off-the-shelf LCD for which you can find tutorials here.
#define MIN_SPEED 50
#define CRAWL_SPEED 85
#define MAX_SPEED 125
#include <LiquidCrystal.h>
LiquidCrystal lcd(30, 31, 40, 41, 42, 43);
#define STROBE_PIN 50
#define INHIBIT_PIN 51
#define BIT1_PIN 21
#define BIT2_PIN 23
#define BIT3_PIN 25
#define BIT4_PIN 27
#define DIRECTION1_PIN 52
#define DIRECTION2_PIN 53
void initMultiplexer() {
//set the output mode.
pinMode(INHIBIT_PIN,OUTPUT);
pinMode(STROBE_PIN,OUTPUT);
pinMode(BIT1_PIN,OUTPUT);
pinMode(BIT2_PIN,OUTPUT);
pinMode(BIT3_PIN,OUTPUT);
pinMode(BIT4_PIN,OUTPUT);
pinMode(DIRECTION1_PIN,OUTPUT);
pinMode(DIRECTION2_PIN,OUTPUT);
//initial state
digitalWrite(INHIBIT_PIN, HIGH); //high = off.
digitalWrite(STROBE_PIN, LOW); //toggle low -> high -> low to set output.
digitalWrite(BIT1_PIN, LOW);
digitalWrite(BIT2_PIN, LOW);
digitalWrite(BIT3_PIN, LOW);
digitalWrite(BIT4_PIN, LOW);
}
void change(int out) {
//work out bits
Serial.print((out >> 3) & 0x01);
if ((out >> 3) & 0x01) digitalWrite(BIT4_PIN, HIGH);
else digitalWrite(BIT4_PIN, LOW);
if ((out >> 2) & 0x01) digitalWrite(BIT3_PIN, HIGH);
else digitalWrite(BIT3_PIN, LOW);
Serial.print((out >> 2) & 0x01);
if ((out >> 1) & 0x01) digitalWrite(BIT2_PIN, HIGH);
else digitalWrite(BIT2_PIN, LOW);
Serial.print((out >> 1) & 0x01);
if ((out) & 0x01) digitalWrite(BIT1_PIN, HIGH);
else digitalWrite(BIT1_PIN, LOW);
Serial.println((out >> 0) & 0x01);
//toggle strobe
digitalWrite(STROBE_PIN, HIGH);
delay(50);
digitalWrite(STROBE_PIN, LOW);
}
void setup() {
initMultiplexer();
Serial.begin(9600);
lcd.begin(16, 2);
}
void updateSensorValue(int& tgt, int latest)
{
int threshold = 25;
if ((latest < (tgt - threshold)) || (latest > (tgt + threshold))) tgt = latest;
}
void pulseMultiplexer() {
//toggle inhibit to low to actually output power
digitalWrite(INHIBIT_PIN,LOW);
delay(125); //25ms is long enough.
digitalWrite(INHIBIT_PIN,HIGH);
delay(1500); //now delay before going to next point.
}
int thresholds[4] = {9999,0,9999,0};
int t = millis();
int oldT = millis(), dirT = oldT;
int a1;
int a2;
int spd = 0;
int dir = 0;
int train_status = 0;
int sensor = 0;
int point = 0;
void loop() {
t = millis();
if ((t - oldT) > 50) {
updateSensorValue(a1, analogRead(0));
updateSensorValue(a2, analogRead(1));
sensor = a1;
if (point == 1) sensor = a2;
switch(train_status) {
case 0: //accelerating
if (spd < MIN_SPEED) spd = MIN_SPEED;
spd += 2;
if (spd > MAX_SPEED) {
train_status = 1;
spd = MAX_SPEED;
}
break;
case 1: //travelling
break;
case 2: //braking
spd -= 10;
if (spd < CRAWL_SPEED) spd = CRAWL_SPEED;
break;
case 3: //paused
spd = 0;
break;
}
if (dir == 1) {
if ((t - dirT > 1250) && (train_status == 0 || train_status == 1)) {
train_status = 2;
dirT = t;
}
else if ((t - dirT > 2000) && train_status == 2 && spd == CRAWL_SPEED) {
train_status = 3;
dirT = t;
}
else if ((t - dirT > 500) && train_status == 3)
{
train_status = 0;
dir = !dir;
dirT = t;
//switch point
change(3);
if (point == 0) {
digitalWrite(DIRECTION1_PIN, HIGH);
digitalWrite(DIRECTION2_PIN, LOW);
Serial.println(0);
} else if (point == 1) {
digitalWrite(DIRECTION1_PIN, LOW);
digitalWrite(DIRECTION2_PIN, HIGH);
Serial.println(1);
}
pulseMultiplexer();
point = !point;
}
}
else if (dir == 0)
{
//we should be checking which point we're about to hit first?
/*if (a1 > 400 && dir == 0) {
spd = 0;
dir = !dir;
train_status = 0;
} else if (a1 > 300 && dir == 0) spd = 70;
else if (a1 > 200 && dir == 0) spd = 90;
else if (a1 > 150 && dir == 0) spd = 110;
else spd = 125;*/
if (train_status != 3) {
if (sensor > 400) {
train_status = 3;
dirT = t;
} else if (sensor > 300) {
train_status = 2;
}
} else if (t - dirT > 500 && train_status == 3) {
train_status = 0;
dir = !dir;
dirT = t;
}
}
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("");
lcd.setCursor(0, 0);
lcd.print(a1);
lcd.setCursor(0, 1);
lcd.print("");
lcd.setCursor(0, 1);
lcd.print(a2);
lcd.setCursor(5, 0);
lcd.print(thresholds[0]);
lcd.setCursor(7, 0);
lcd.print(thresholds[1]);
lcd.setCursor(5, 1);
lcd.print(thresholds[2]);
lcd.setCursor(7, 1);
lcd.print(thresholds[3]);
lcd.setCursor(11, 0);
lcd.print(spd);
lcd.setCursor(11, 1);
lcd.print(dir);
lcd.setCursor(15, 1);
lcd.print(train_status);
oldT = t;
}
if (a1 < thresholds[0]) thresholds[0] = a1;
if (a1 > thresholds[1]) thresholds[1] = a1;
if (a2 < thresholds[2]) thresholds[2] = a2;
if (a2 > thresholds[3]) thresholds[3] = a2;
if (dir == 0) {
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
} else {
digitalWrite(4, HIGH);
digitalWrite(3, LOW);
}
analogWrite(2, spd);
}
From the above, we get the following action... note that the whole process here is automated (throttle, detection, point switching):
Conclusion
This sensor worked much better than the previous attempts... but it's still not the best. I think I might now just grab one of the GP2D120s (as it would simply be plug-and-play) and see what happens. Also lighting plays an affect here too, it might just be easier in the end to have a strip of LDRs to work out where the train is... but everything has it's good and bad side!
The other option will be to have a spaced strip of detectors down one side of the track and emitters on the other. This will be like your tandy/radio-shack store that beep-beeps when you trip the beam... we'll see how well it works.
Controlling lots of LEDs with your Arduino
There's a great article on the MAX7219/MAX7221 LED Drivers on arduino.cc that details how to utilise these chips to control a large amount of LEDs (MAX7219/7221 Datasheet.) The layout I've been working on was always going to have a lot of scenery lighting and I'd decided this time to use LEDs over traditional 12v DC Bulbs as they draw less current and can often be a lot brighter. Also, Japan does use a lot more 'white light' when lighting streets and train/traffic signals, so it fits in close enough to the prototype.
LED Drivers are specific intergrated circuits that are designed to control a large amount of LEDs wired up in a matrix. This means that, in the case of the MAX7219/7221, the LEDs will be in rows and columns of 8 for a total of 64 LEDs per chip. The exact wiring dictates that each column contains 8 cathodes and each row 8 anodes. This therefore means that if you apply power to one row, and then ground a column, you will light the associated LED. Of course, this means that if you power two rows and two columns you will in fact have 4 LEDs lit. This is because the matrix is limited in only being able to light specific LEDs on a row-by-row basis.
Fortunately, the Drivers are fast enough to light row after row (selecting the exact LEDs to light by grounding certain columns) making it look like all LEDs are on at the same time. Therefore, you can specify the exact LEDs to light and, in the case of an 8x8 matrix, you can draw pictures, scroll text, etc...
Of course, you are not limited to controlling a matrix. These chips fundamentally just light up 64 LEDs and, for my layout, this should be enough for my scenery requirements. The main issue is actually building a 'distribution point' for getting the 64 pairs of wires out to the LEDs from the chip.
Note: PLEASE make sure you have a 'clean' power supply and it's connected cleanly and solidly. I just spent a day diagnosing why my LEDs stopped working... it was because my 12v power distribution had a dry solder joint... totally frustrating!
As the chip only has 16 pins (8 rows, 8 columns), one has to split these out into inidividual wires to LEDs.
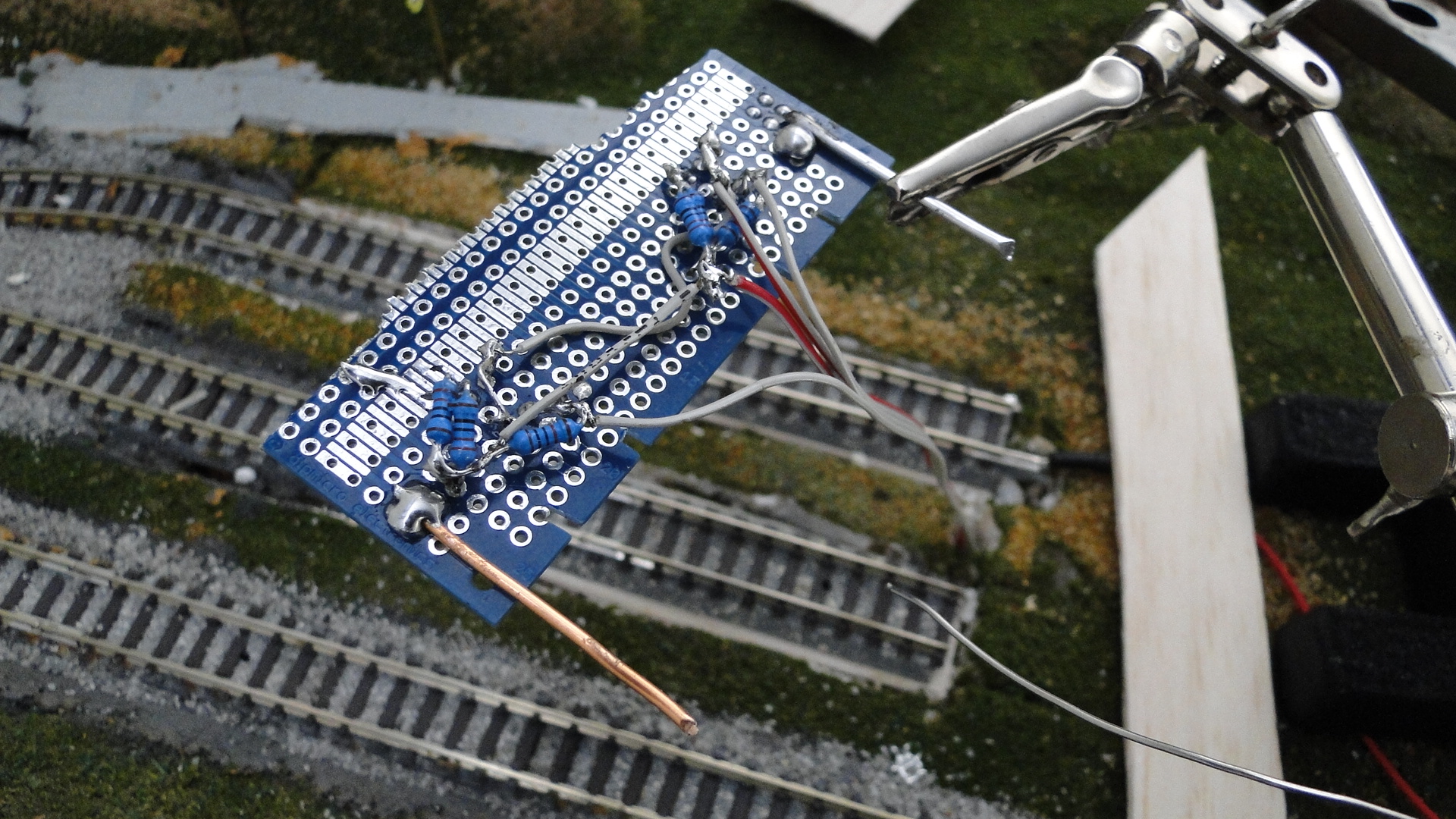
If you happen to have your LEDs in groups/clusters of 8 then you will have a lot less trouble wiring everything up... otherwise you'll need to tediously create a 'distribution board' like I've done here:
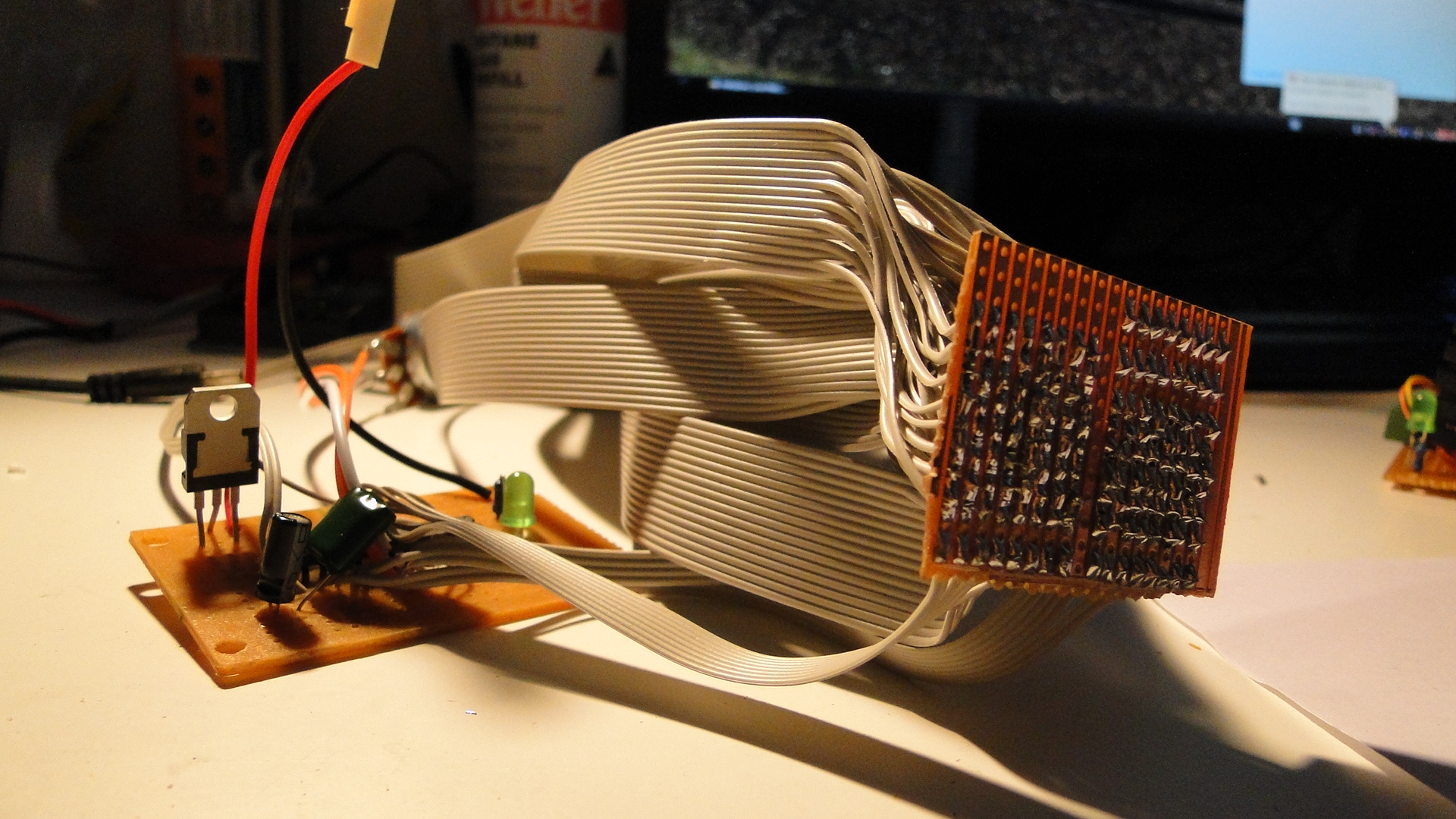
So, once this was together I put some plugs on the end of the ribbon wire and then added header pins to my LED wiring. This then meant I could simply plug the LEDs in as no resistors are required. Trying to work out which way around to put them was quite easy, as they seem to get full voltage if you put them the wrong way! So, be careful, if this happens then quickly reverse the LED.
I then wrote some code to turn my well-lit footpath into a flashing mess...
//pins for the MAX7219
#define CLK_PIN 31
#define LOD_PIN 33
#define DIN_PIN 35
//pins for my L298N throttle
#define THROTTLE_ENABLE 2
#define PWM1_PIN 3
#define PWM2_PIN 4
//library required from:
//http://www.arduino.cc/playground/uploads/Main/LedControl.zip
#include "LedControl.h"
//LED CONTROL... 3 pins and then the number of devices
LedControl lcl=LedControl(DIN_PIN,CLK_PIN,LOD_PIN, 1);
//currently connected lights:
//ROW 0: NONE.
//ROW 1: Building, Building, Building, Building,
// Streetlight, Streetlight, Streetlight, Streetlight
//ROW 2-3: NONE.
//ROW 4: Streetlight, Streetlight, Streetlight, Streetlight,
// Streetlight, Streetlight, Building
//ROW 4-7: NONE.
void setup() {
//initialise the led driver...
lcl.shutdown(0, false); //turn off shutdown..
lcl.setIntensity(0, 8); //set the intensity, you can also use the potentiometer.
//set initial throttle, direction and speed
pinMode(THROTTLE_ENABLE, OUTPUT);
digitalWrite(PWM2_PIN, HIGH);
digitalWrite(PWM1_PIN, LOW);
analogWrite(THROTTLE_ENABLE, 200);
//turn on the building lights.
for (int i = 0; i < 4; i++) lcl.setLed(0,1,i,true);
lcl.setLed(0,4,6,true);
}
int MS_DELAY = 300; //timing, close enough to train speed.
void loop() {
//the streetlights are in a bit of a jumbled order:
//ROW 4: 5,4,3,2,1 and then ROW 1: 4,5,6,7.
//turn them all on
for (int x = 5; x >= 0; x--){
lcl.setLed(0, 4, x, true);
delay(MS_DELAY);
}
for (int x = 4; x < 8; x++){
lcl.setLed(0, 1, x, true);
delay(MS_DELAY);
}
//now turn them back off
for (int x = 5; x >= 0; x--){
lcl.setLed(0,4,x,false);
delay(MS_DELAY);
}
for (int x = 4; x < 8; x++){
lcl.setLed(0,1,x,false);
delay(MS_DELAY);
}
}
And here was the result, with my homemade street lights:



The best thing about these chips is that they can be daisy-chained together to control a total of 512 LEDs off 3 pins. If you think you'll need more than that for your project, then you're crazy... but it can be done. Simply utilise another 3 digital pins of your Arduino to control another 512 LEDs... I shudder to think of something lit that brightly.
Multiplexing + Controlling points (or other high-current devices) with an Arduino
OK, the Arduino only has a limited number of pins at your disposal (more depending on what model you are in possession of) but, don't fret, there is a way of extending the amount of inputs _and_ outputs.
Multiplexing, as defined by Wikipedia is:
In telecommunications and computer networks, multiplexing (also known as muxing) is a process where multiple analog message signals or digital data streams are combined into one signal over a shared medium. The aim is to share an expensive resource. For example, in telecommunications, several phone calls may be transferred using one wire. It originated in telegraphy, and is now widely applied in communications.
In our situation, we're using digital data and our shared medium will be a smaller group of pins than the amount required if we were to hook up the sum total of devices able to be connected. So, in our case we will use the CD4514BC "4-Bit Latched/4-to-16 Line Decoder" to control/read 16 digital lines from only 6 digital pins.
Quick note:
If you don't mind that the chip is always outputting then just ground the Inhibit pin. It'll save you a pin on your Arduino!
First, a short stint of binary logic. Our numbering scheme will start from 0 and end at 15, giving us 16 possible values. This can be written in binary using 4 digits.
| Bit 4 | Bit 3 | Bit 2 | Bit 1 | Value | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Value | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 8 | |
| 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 9 | |
| 0 | 0 | 1 | 0 | 2 | 1 | 0 | 1 | 0 | 10 | |
| 0 | 0 | 1 | 1 | 3 | 1 | 0 | 1 | 1 | 11 | |
| 0 | 1 | 0 | 0 | 4 | 1 | 1 | 0 | 0 | 12 | |
| 0 | 1 | 0 | 1 | 5 | 1 | 1 | 0 | 1 | 13 | |
| 0 | 1 | 1 | 0 | 6 | 1 | 1 | 1 | 0 | 14 | |
| 0 | 1 | 1 | 1 | 7 | 1 | 1 | 1 | 1 | 15 |
Right, from this table you can see that by setting the Bits to either '1' or '0' we can, with 4 bits, create the numbers from 0 to 15. Now, this is how the input of the CD4514BC Line Decoder works; it accepts digital input on 4 pins, and dependent on whether they are high or low, will output a +5v on the decoded output pin. The chip has, of course, 16 output pins.
The only catch to using this chip is that it also requires 'Strobe' and 'Inhibit' digital inputs. It is called a 'Latched' Line Decoder since it actually holds the output that you have selected. So, the basic idea when controlling it is to:
- 1 - Set the 4 bits to the desired output
- 2 - 'Toggle' the 'Strobe' pin. This means setting it to 'HIGH' and then 'LOW' again (this then 'latches' the next pin to output on)
- 3 - Set the 'Inhibit' pin 'LOW' to output on this pin. When this is 'HIGH', there will never be any output.
Here is the wiring I have used for the CD4514BC:
Dragging the 'Inhibit' HIGH should prevent the points from erratic data on the pins when there is no proper input signal.
From this we can see that we can control 16 devices. The only note is that the multiplexer can only ever output on one pin at a time.
Controlling this chip is quite simple. The steps, as outlined above, are documented in the following code:
#define STROBE_PIN 51
#define INHIBIT_PIN 53
#define BIT1_PIN 31
#define BIT2_PIN 33
#define BIT3_PIN 35
#define BIT4_PIN 37
#define DIRECTION1_PIN 22
#define DIRECTION2_PIN 24
#define TOTAL_OUTPUTS 5 //should 16, but we're only controlling 5 pins for now.
void setup() {
Serial.begin(9600);
//set the output mode.
pinMode(INHIBIT_PIN,OUTPUT);
pinMode(STROBE_PIN,OUTPUT);
pinMode(BIT1_PIN,OUTPUT);
pinMode(BIT2_PIN,OUTPUT);
pinMode(BIT3_PIN,OUTPUT);
pinMode(BIT4_PIN,OUTPUT);
//initial state
digitalWrite(INHIBIT_PIN, HIGH); //high = off.
digitalWrite(STROBE_PIN, LOW); //toggle low -> high -> low to set output.
digitalWrite(BIT1_PIN, LOW);
digitalWrite(BIT2_PIN, LOW);
digitalWrite(BIT3_PIN, LOW);
digitalWrite(BIT4_PIN, LOW);
}
void changeOutputPin(int out) {
//work out bits
if (out >> 3 & 0x01) digitalWrite(BIT4_PIN, HIGH);
else digitalWrite(BIT4_PIN, LOW);
if ((out >> 2) & 0x01) digitalWrite(BIT3_PIN, HIGH);
else digitalWrite(BIT3_PIN, LOW);
if ((out >> 1) & 0x01) digitalWrite(BIT2_PIN, HIGH);
else digitalWrite(BIT2_PIN, LOW);
if ((out) & 0x01) digitalWrite(BIT1_PIN, HIGH);
else digitalWrite(BIT1_PIN, LOW);
//toggle strobe
digitalWrite(STROBE_PIN, HIGH);
digitalWrite(STROBE_PIN, LOW);
}
int currentOutput = 0;
int switchDir = 0;
void loop() {
changeOutputPin(currentOutput);
currentOutput++;
if (currentOutput > TOTAL_OUTPUTS) {
//only control 8 outputs... change the dir once looped.
currentOutput = 0;
switchDir = !switchDir;
if (switchDir == 1) {
digitalWrite(DIRECTION1_PIN, HIGH);
digitalWrite(DIRECTION2_PIN, LOW);
} else {
digitalWrite(DIRECTION1_PIN, LOW);
digitalWrite(DIRECTION2_PIN, HIGH);
}
}
//toggle inhibit to low to actually output power
digitalWrite(INHIBIT_PIN,LOW);
delay(25); //25ms is long enough.
digitalWrite(INHIBIT_PIN,HIGH);
delay(1500); //now delay before going to next point.
}.
Controlling Point Motors
The Tomix Finetrack points I use on my layout have in-built electromagnets to change their direction. Electromagnets are known to suck a large amount of current in a short burst as they receive power and begin to 'throw'. Due to this, powering one directly off one of the Arduino's output pins is not recommended. Another issue is that the electromagnets will heat up if they are constantly powered. Due to this, they require an external power source controlled in short bursts.
A H-Bridge is used when controlling the actual model locomotives and here one will also be used to control the point magnets. H-Bridges are a great solution to the above issue as they utilise an isolated power supply and can output a reversed polarity. The point magnets from Tomix are only 2-wire and require the polarity to be reversed to switch the track in the other direction.
Note that this can therefore be used to control anything that requires a 5v-34v DC ~1A power source. This could be bulb lighting (where you can vary the voltage/brightness), motors/actuators/solenoids for scenery effects, etc...
So, firstly here's an example of hooking up an L293D or SN754410 H-Bridge to two point motors/magnets:
Now, there are three wires feeding into the above circuit (per point motor/side of circuit) that need signals. First is the 'activate' pin which should stay low and only be brought high for brief periods of time to send voltage to the point magnet. Second is the 'directional' pins where:
- LOW, LOW: No output
- LOW, HIGH: Left (-/+)
- LOW, HIGH: Right(+/-)
- HIGH, HIGH: SHORT! Do not do this!
So, to get the 'enable' signal to the H-Bridge we will utilise 6 pins on the Arduino. One for the actual signal to send and then 3 to control a multiplexer which will then allow us to actually control 8 outputs. This multiplexer (CD4514BC) can only send a signal on one of it's 16 pins at a time. The goal therefore is to set the four input wires (which then selects the output) and then produce the HIGH signal for a brief period of time. This will send the required signal to the H-Bridge which will, in turn, output the 12v pulse to the point magnet.
The final requirement is to set the direction. I have bridged the inputs on all H-Bridges to a single pair of digital outs on the Arduino. I simply set one HIGH and the other LOW to switch in a direction. You could actually use one pin and have a Hex Inverter create the opposite signal required for the other input on the bridge.
Since I only ever enable one side of one H-Bridge, it is perfectly safe to set all inputs on all bridges at the same time.
Here is the final setup:
My ugly diagram showing you how to connect the components.
The functional dog's breakfast... This is a tiny piece of veroboard with 4 H-Bridges (8 outputs) and an LM7805 to provide the +5v. The inputs on the H-Bridges are chained together and the enable pins (8 of them) run to one side of the CD4514BC.
Here is the CD4514BC Multiplexer. This receives 6 wires from the Arduino and then outputs 16 digital to whatever I require.
And everything working in concert.
Detecting trains with InfraRed + Arduino
You've probably seen a lot of reversing/stopping circuits around, but the majority of these run on occupancy detection in track blocks. This can work very well but, due to the differences in train engines, you can have issues with how quickly to slow/stop individual locomotives. There are other ways of detecting a train coming to a dead-end, and here I'll show a method using Infrared Light.
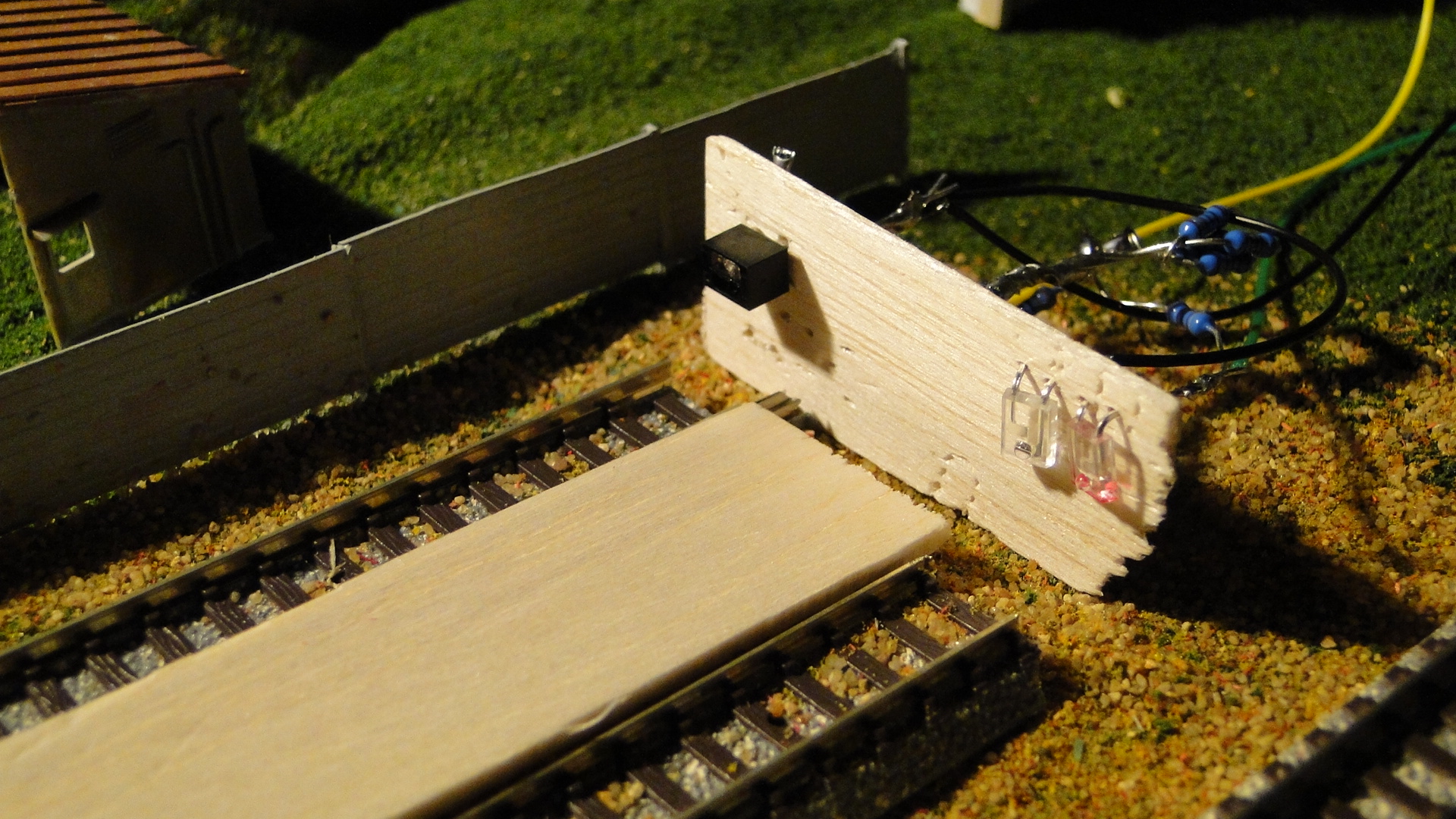
Infrared light can't be seen by the human eye, but can be picked up by electronic devices. Due to this, it can be used freely around your layout (with the exception that direct sunlight/room-light can cause interference) for detecting your trains. One of the more common usages is to put an emitter/detector combination in a buffer to stop a train as it comes to the end of the line.
Note that there are two emitter/detector devices! Each 'black box' in that diagram contains both an emitter and a detector. The benefit of using the QRD1114 means that these are neatly packaged in one unit!
In this set up the emitter and detector are both facing towards an approaching vehicle. The emitter-side of the QRD1114 will always be emitting infrared light down the track. The detector will then receive the infrared light reflected off the vehicle as it approaches and its internal resistance will rise accordingly. This means we can read the resistance of the detector to know how close the train is therefore slow it down proportionately. We can therefore ensure the train does not hit the buffer by checking the value of the detector and altering the speed of the train quickly and appropriately.
Firstly, here's the circuit for wiring up both the 'Infrared Emitters and Detectors' and the Optical Detector / Phototransistor (recommended) from Toys Downunder. And Here's the datasheet for the latter QRD1114.
Note: I happened to test out both setups as I destroyed my first QRD1114 by applying 5v directly to the emitter... You must only apply 1.7v max!
And then the detector set up on the engine shed roads:

The two roads above will eventually be located inside an engine shed. Due to the potential interference from one emitter to the other, I will put a separator down the middle of the tracks.
The maxmimum read distance I could achieve was just under 6cm during testing**. This wasn't exactly what I was expecting and would've liked around 10-12cm for this purpose, but I worked around this. It seems that there is a more expensive detector at Toys Downunder: Sharp GP2Y0A21YK that can detect object up to 84cm away. I imagine it would be as simple as obtaining larger IR LEDs to boost the light output and therefore the light reflection.
Once the two detectors were in place, I set about automating a quick shunting process. I'd started noticing that, depending on room light, the readers weren't doing the best job; down to around 20mm distance was all that was being detected. This would not be enough to measure the speed as I wanted to, but I kept going anyway.
Programming the detector was the same as the potentiometer throttle done previously. The detector acted as a variable resistor and the reading would be from +1000 to 0 depending on the reflectivity of the object. It turned out that 0 was when the object was closest to the detector. Unfortunately, this only started changing once the object came within 30mm.
Here's a video of my quick shunt automation in action. First with the QRD1114 and then with the separate emitter/detector:
Results
I ended up stopping progress on this as the detector didn't respond as well as I'd have wanted. After getting a 6cm read distance during test I thought it would feasible, but this dropped to a max of 15mm when actually installed on the track. There would be too much re-adjusting to get either of the types of infrared detectors to work.
The only option from here is to purchase the Sharp detector mentioned above and see if it really can detect 84cm!
Random Photos
Search
Tags
Links - Click for details
- Abandoned Rails (Japan)
- AIRLINE (Shinkansen Photography)
- Akihabara Station
- annexpressのブログ
- Australian Model Railway Magazine
- DCC普及協会ホームページ (Japanese DCC)
- Dead Section (Japanese Track Diagrams)
- Delicious Things (Japanese N Scale DCC)
- Densha Wotorou
- Digital Direct for Windows (DCC Server)
- Don's Dream World – AMAZING N Scale Japanese Layout
- Hatena::Diary
- Japanese N-Scale Modeling Forum
- JR Chiisai
- Kaz-T's blog レインボーライン (Rainbow Line)
- LED Resitance Calculator
- Masioka
- Poppondetta Blog
- RailFan Magazine, Japan
- Railmind
- Railway Travelers' Room
- Serenity Valley
- Shashinka Ichiban
- Shuzuku
- Sumida Crossing
- The next station is…
- Tomix N Gauge Track and Japanese N Gauge Trains
- TT Forums (Transport Tycoon Deluxe)
- 名鉄尾西線の貨物列車 (Nagoya: Meitetsu Freight)
- 日本型Nゲージ DCC改造例のご紹介 (Okiraku DCC)
- 泰 茅 轍 道 (Taichi Railway)
- 箱庭登山鉄道製作記 (Hakone-Tozan Layout Blog)
Archive
- July 2026
- May 2026
- April 2026
- March 2026
- February 2026
- January 2026
- November 2025
- October 2025
- September 2025
- August 2025
- July 2025
- June 2025
- February 2025
- January 2025
- November 2024
- September 2024
- August 2024
- July 2024
- June 2024
- May 2024
- April 2024
- March 2024
- February 2024
- December 2023
- October 2023
- September 2023
- August 2023
- July 2023
- June 2023
- May 2023
- April 2023
- March 2023
- December 2022
- November 2022
- October 2022
- April 2022
- March 2022
- February 2022
- January 2022
- December 2021
- November 2021
- September 2021
- August 2021
- July 2021
- May 2021
- March 2021
- February 2021
- January 2021
- October 2020
- September 2020
- August 2020
- July 2020
- June 2020
- May 2020
- April 2020
- March 2020
- January 2020
- December 2019
- November 2019
- October 2019
- September 2019
- August 2019
- July 2019
- June 2019
- April 2019
- March 2019
- February 2019
- January 2019
- December 2018
- November 2018
- October 2018
- September 2018
- August 2018
- July 2018
- June 2018
- May 2018
- April 2018
- March 2018
- January 2018
- December 2017
- November 2017
- October 2017
- September 2017
- August 2017
- July 2017
- June 2017
- May 2017
- March 2017
- February 2017
- January 2017
- December 2016
- November 2016
- October 2016
- September 2016
- August 2016
- July 2016
- June 2016
- May 2016
- February 2016
- November 2015
- October 2015
- September 2015
- August 2015
- July 2015
- June 2015
- May 2015
- April 2015
- March 2015
- February 2015
- January 2015
- December 2014
- November 2014
- August 2014
- July 2014
- May 2014
- April 2014
- March 2014
- December 2013
- November 2013
- October 2013
- June 2013
- August 2012
- April 2012
- March 2012
- February 2012
- November 2011
- October 2011
- September 2011
- July 2011
- June 2011
- May 2011
- April 2011
- March 2011
- February 2011
- January 2011
- December 2010
- November 2010
- October 2010
- September 2010
- August 2010
- June 2010
- May 2010
- April 2010
- March 2010
- February 2010
- January 2010
- December 2009
- November 2009
- October 2009
- August 2009
- January 2009
- December 2008
- November 2008
- October 2008
- September 2008
- July 2008